
Hoe u quadcopter-besturingsapparatuur kiest. Quadcopter-besturingsapparatuur, wat het is en hoe u vlaggenschip-radiobesturingssystemen kunt kiezen
Radioapparatuur voor quadcopters
Quadcopters zijn vogels van vrije vlucht. Voor de besturing hebben ze dan ook radioapparatuur nodig waarmee de piloot de drone kan besturen. Maar de bedieningspanelen zijn allemaal nieuw en verschillen zeer sterk in kenmerken. En niet iedereen blinkt uit in ergonomie. Het vervangen van de afstandsbediening van de ene helikopter naar de andere is een fluitje van een cent.
Wat is het verschil tussen radioapparatuur voor het besturen van drones?
Zoals hierboven vermeld, is elk bedieningspaneel een soort individualiteit.
En je moet duidelijk begrijpen hoe ze van elkaar verschillen:
- Gemak. Geen wonder dat dit punt op de eerste plaats komt. Als het bedieningspaneel ongemakkelijk in uw hand ligt, zullen de sensaties van de vlucht wazig zijn;
- Batterijduur. De afstandsbedieningen werken op . Daarom moeten ze periodiek worden opgeladen. Natuurlijk niet zo vaak als de drones zelf, maar toch;
- Bereik. Een zeer belangrijke parameter. Het bepaalt hoe ver de quadcopter van u af kan vliegen. Bij “indoor” drones is het actiebereik bijvoorbeeld niet meer dan 5 meter. En de professionele DJI Phantom 4 kan maar liefst 5 km vliegen;
- Werk frequentie. Dit is een andere nuance waarmee rekening moet worden gehouden. Het radiogolfbereik van de afstandsbediening en de helikopter moet hetzelfde zijn.
Alternatieve controlemethode
Op sommige bedieningspanelen kunt u een smartphone of tablet aansluiten. Vanaf daar kun je het besturen. Het beeld van de camera wordt daar weergegeven en tegelijkertijd verschijnen de bedieningselementen. In dit geval fungeert de radioapparatuur alleen als zender en zet het signaal van de smartphone om in radiogolven die de helikopter kan begrijpen.
Wat te kiezen?
Als u niet naar quadcopter-vliegwedstrijden gaat en uw huisdier niet over lange afstanden gaat sturen, dan is een standaard afstandsbediening perfect voor u. Maar als je tussen andere helikopters vliegt, of je vliegradius wilt vergroten, of gaat vliegen in megasteden waar alles doordrenkt is met radiogolven, dan is het beter om de voorkeur te geven aan radioapparatuur van derden. Zo is de kans kleiner dat het signaal van de afstandsbediening wordt “verstopt” of onderschept door een andere piloot.
Natuurlijk wordt de apparatuur van DJI erkend als de beste ter wereld (om hem te koppelen aan een helikopter van een ander bedrijf, moet je een speciale ontvanger installeren). Maar er zijn ook veel andere fabrikanten wier producten de moeite waard zijn om op te letten. Overigens zul je hier in de meeste gevallen ook een extra ontvanger voor de helikopter moeten kopen als deze niet in de set is inbegrepen.
Het is de moeite waard om aandacht te besteden aan de volgende modellen:
- FRSky TARANIS;
- Walkera DEVO 7;
- Walkera DEVO 10;
- HK-T6A V2.
Met het begin van de lente is het tijd om over vliegtuigmodellering te praten, omdat de eerste dagen van echt vliegweer onze collega's in de meeste regio's van het land al tevreden hebben gesteld. Er blijft steeds minder tijd over om je voor te bereiden op het seizoen. Er bestond geen specifieke twijfel over waar te beginnen, aangezien de radiobesturingsapparatuur doorgaans als eerste wordt aangeschaft en voor alle modellen wordt gebruikt, evenals voor training op de simulator*.
Dit artikel helpt u door het brede scala aan radiobesturingssystemen te navigeren en uw eigen behoeften te begrijpen. In elke sectie van het artikel geven we voorbeelden van relevante producten uit de Hobby Center-catalogus. Als u bij ons gaat winkelen helpen deze adviezen u vooraf bij het maken van een keuze, maar onderstaande algemene informatie geldt ook voor producten van andere merken.
 |
 |
 |
 |
 |
Hoe radiobesturingsapparatuur te kiezen - basisprincipes
Veel ervaren modelbouwers geven op de vraag welk radiobesturingssysteem ze moeten kopen zeer vergelijkbare antwoorden, waaronder:
- Kies er een waarvan de capaciteiten vele jaren meegaan;
- Neem ‘voor groei’;
- Het eenvoudigste is om geen geld te sparen.
Het advies is op het eerste gezicht correct, maar erg vaag. Het is op basis van dergelijke aanbevelingen dat er een fundamenteel verkeerde beslissing ontstaat: het aanschaffen van vliegtuigmodelleringsapparatuur op basis van het principe van het kiezen van de duurste kit die in het budget past. Het is juister om ons te laten leiden door bepaalde criteria, waarover we zullen praten. De onderstaande lijst is samengesteld op basis van de persoonlijke ervaringen van de auteur en observaties van collega's in de hobby en sport van vliegtuigmodellering. Deze vereisten voor radiobesturingsapparatuur komen dus meestal voort uit gebruikers:
- Beschikbaarheid van instellingen voor elk type model: vliegtuig, helikopter, zweefvliegtuig, multicopter. Probeer de vraag te beantwoorden welke van deze vliegtuigen zich bij uw vloot kunnen voegen;
- Ergonomie- het is veel belangrijker dan het lijkt. Onthoud: het is de zender die u in uw handen houdt, en het is de moeite waard om het te proberen voordat u het koopt. Iedereen heeft persoonlijke kenmerken en voorkeuren bij handplaatsing. Parameters zoals het gewicht, de dikte en de vorm van de kast, de balans ervan, de lengte en vorm van de bedieningshendels, de afstand tussen de handgrepen, de aanwezigheid van zachte plastic inzetstukken op de juiste plaatsen en nog veel meer spelen hierbij een rol. Bij sommige modellenklassen komt de ergonomie van de zender op de eerste plaats, bijvoorbeeld bij het werpen van zweefvliegtuigen;
- Functionaliteit. Functies zoals exponentiële waarden en dubbele kosten zijn vereist voor elk model dat serieuzer is dan een touringcar. Voor vliegtuigen en helikopters met verbrandingsmotoren is een motoruitschakelfunctie op afstand vereist. De meeste vliegtuigen voor klassieke en 3D-kunstvliegen vereisen het gebruik van mixers. Bij het besturen van helikopters zullen de functies voor het aanpassen van het zweefpunt en de virtuele ring nuttig zijn. Beperk jezelf niet tot het lezen van de instructies van de modellen; daar vind je alleen de meest noodzakelijke instellingen. Ontdek van ervaren hobbyisten welke functies zij gebruiken en waarom;
- Aantal besturingskanalen. Voor de meeste hobbymodellen zijn 6-8 kanalen voldoende, maar als je volgende hobby kopieën op serieus niveau is, zul je complexe vleugelmechanisatie en verschillende systemen moeten beheersen die de functies van het prototype imiteren.
- Nauwkeurigheid, responstijd, resolutie van de belangrijkste besturingskanalen (aantal punten). Bij het besturen van de meeste instapvliegtuigen is het onwaarschijnlijk dat u een verschil merkt in de nauwkeurigheid en snelheid van radiobesturingssystemen, maar de situatie zal veranderen als we het hebben over een volwaardig vluchtmodel. Deze parameters zijn zelfs nog belangrijker voor 3D-helikopters en racemodellen. Naast de elektronische "vulling" hebben ook mechanica invloed op de nauwkeurigheid - bedieningsknoppen op lagers hebben de voorkeur;
- Relevantie. Zorg er bij de aanschaf van een radiobesturingssysteem voor dat ontvangers, batterijen en andere accessoires worden geproduceerd voor de geselecteerde apparatuur en dat er ondersteuning van de fabrikant wordt geboden;
- Compatibiliteit van standaarden. Bestudeer de situatie in de club of op het veld waar je gaat vliegen en ontdek welke radiobesturingssystemen ervaren collega's gebruiken. De compatibiliteit van protocollen, PPM-connectoren en bestandssystemen biedt enorme mogelijkheden: trainen met een instructeur via een “trainer-student” kabel, het verkrijgen van kant-en-klare modelinstellingenprofielen, de mogelijkheid om ontvangers uit te wisselen en nog veel meer.
- Sterkte en duurzaamheid van materialen. Als u van plan bent om één keer per week op een ontspannen manier te vliegen, kunt u aan dit punt minder aandacht besteden, maar voor intensief trainende atleten en hobbypiloten die het modelleren van vliegtuigen als hun belangrijkste hobby hebben gekozen, zou het probleem van uitrustingsslijtage in principe niet moeten voorkomen. . Daarnaast ligt een kwalitatief goed item prettig in de hand!
- Beschikbaarheid van gespecialiseerde ontvangers. We hebben dit item bewust aan het einde van de lijst geplaatst vanwege de specificiteit ervan. Ontvangers die bij uitrustingssets worden geleverd, zijn meestal onderverdeeld in Full Range (lange afstand, voor middelgrote en grote modellen) en Park Flyer-klassen - voor kleine vliegtuigen (met een spanwijdte van niet meer dan een meter) en minihelikopters. Voor gigantische modellen kunnen ontvangers met een krachtige stroombus nuttig zijn - dit is erg handig en stelt u in staat het gebruik van spanningsomvormers te vermijden. Voor de lichtste binnenvliegtuigen uit de F3P-klasse zijn microontvangers nodig die minder dan een gram wegen. Veel controllers van moderne multicopters en helikopterstabilisatiesystemen werken alleen via een seriële verbindingsbus. Deze technologie, genaamd S.Bus, wordt aangeboden door de beroemde Japanse fabrikant Futaba.
We hopen dat deze punten u hebben geholpen uw eigen behoeften te begrijpen en het selectieproces te vereenvoudigen. Laten we het nu hebben over waarin conventionele radiobesturingssystemen voor vliegtuigmodellen kunnen worden onderverdeeld en voorbeelden geven van de meest succesvolle producten van merken en.
Radiobesturingsapparatuur op instapniveau
Deze kits zijn bedoeld voor degenen die zoveel mogelijk willen sparen en nog niet hebben besloten hoe belangrijk een plek in het modelleren in hun leven zal innemen. Dergelijke systemen zijn ontworpen voor eenvoudige modellen van vliegtuigen en multicopters. Na een upgrade naar meer geavanceerde hardware kan de zender worden gebruikt voor simulatortraining. Kenmerken:
- 4-6 besturingskanalen;
- Gebrek aan instellingen, met uitzondering van kanaalomkering, gebrek aan weergave;
- Onvermogen om modelinstellingen op te slaan;
- Onmogelijkheid van gebruik voor helikopters met een collectieve spoed van de hoofdrotor;
- Lage prijs.

Het goedkoopste radiobesturingssysteem in onze catalogus heeft 4 besturingskanalen. Een voordelig verschil met de modellen van concurrenten is de aanwezigheid van digitale trimmers (de trimmer kan niet worden verplaatst wanneer de apparatuur is uitgeschakeld, de positie blijft in het geheugen van de zender tot de volgende keer dat deze wordt ingeschakeld) en een deltamixer, waarmee de i4 te gebruiken voor vliegende vleugelmodellen. Het systeem is compatibel met alle ontvangers die het AFHDS2-protocol gebruiken - ze hoeven niet te worden gewijzigd bij het overschakelen naar geavanceerdere apparatuur van dezelfde fabrikant. Unieke vormfactor: licht van gewicht en slank ontwerp.
Programmeerbare hardware voor modellen uit het middensegment
Volgens de statistieken is er de grootste vraag naar systemen uit deze groep, wat niet verrassend is - gezien hun lage kosten is de functionaliteit voldoende voor de overgrote meerderheid van hobbymodellen van alle klassen. Kenmerken:
- 6-8 besturingskanalen;
- Beschikbaarheid van menu's voor vliegtuigen en helikopters;
- Geheugen voor verschillende modellen, instelling van basisparameters: stroomsnelheden, exponentiële waarden, motoruitschakeling, flaperons;
- De aanwezigheid van meerdere lineaire mixers (ze stellen een lineaire afhankelijkheid in van de invloed van het ene besturingskanaal op het andere);
- Klein LCD-display voor het weergeven van parameters.

Het populairste model uit de lijn. Naast de hierboven genoemde functies beschikt het systeem over basistelemetriefuncties: u kunt de spanning op de modelontvanger regelen. Het uitrustingsmenu is eenvoudig en intuïtief. Het compacte formaat en het minimale gewicht maken de i6 niet alleen interessant voor beginners, maar ook voor ervaren modelbouwers - als tweede zender voor op reis. De bijgewerkte versie heeft een touchscreen en is speciaal aangepast voor gebruik met multicopters.

Het jongste model in de lijn van het legendarische Japanse merk. Het heeft een eenvoudige menu-interface en een doordachte ergonomie; de flexibiliteit in instellingen is groter vergeleken met FlySky i6. De batterijcassette kan worden vervangen door een Ni-MH- of Li-Po-batterij. Het systeem is compatibel met alle Futaba-vliegtuigmodelontvangers die de FHSS- en S-FHSS-protocollen gebruiken. De standaard Futaba PPM-connector aan de achterkant van de zender is populair onder simulatorfabrikanten, dus het is niet nodig om een adapter te selecteren. De antenne is in een handig handvat geplaatst, zodat u de zender kunt dragen.

Apparatuur die erkenning heeft gekregen als ‘folk’. 9 besturingskanalen, eenvoudige vervanging van de hoogfrequente module en de aanwezigheid van OpenTX-firmware van derden - dit alles maakte het systeem een goede keuze voor degenen die van experimenten en de meest flexibele instellingen houden. Rijke functionaliteit en een lage prijs compenseren zelfs zulke kleine tekortkomingen als goedkope materialen en een vereenvoudigd carrosserieontwerp. De apparatuur wordt onder verschillende merken geproduceerd, maar de oorspronkelijke fabrikant is FlySky.
Geavanceerde radiobesturingsapparatuur op amateurniveau - op het kruispunt van hobby en sport
De systemen die in deze sectie worden vermeld, zijn geschikt voor alle modellen, inclusief de meest complexe - 3D kunstvliegende gigantische vliegtuigen en straalreplica's, evenals sportzweefvliegtuigen. De functionaliteit voldoet aan de eisen van een ervaren modelbouwer. Wij raden u aan de volledige beschrijving van elk van de vermelde radiobesturingssystemen te lezen. Verschillende kenmerken die typerend zijn voor de hele groep:
- 8-16 controlekanalen;
- Beschikbaarheid van een volledig zweefvliegtuigmenu naast vliegtuig- en helikoptermenu's;
- Extra functies: puntmixers, logische schakelaars met meerdere condities;
- De aanwezigheid van een groter aantal tuimelschakelaars en knoppen, vrije toewijzing van functies;
- Mogelijkheid om modelinstellingen uit te wisselen met collega's die soortgelijke apparatuur gebruiken;
- Doordachte ergonomie, bedieningshendels op lagers, wijdverbreid gebruik van metaal en zacht plastic in het ontwerp;
- Groot display voor meer visuele informatieweergave.

Het systeem is absoluut een klassieker in het genre en wordt sinds 2012 geproduceerd en verliest niet aan relevantie dankzij de grote basis voor de toekomst die door de fabrikant is gelegd. Opvallende extra functies zijn onder meer puntmixers, logische schakelaars, virtuele ring- en hoverpuntmodi voor helikopters en speciale mixers voor zweefvliegtuigen. De apparatuur beschikt over 14 regelkanalen (12 proportioneel en 2 discreet). De software is bijgewerkt, de fabrikant publiceert nieuwe officiële firmware. Er werd gebruik gemaakt van het FASST-protocol voor gegevensoverdracht - naast maximale nauwkeurigheid en ruisimmuniteit betekent dit dat u beschikt over een grote keuze aan zeer gespecialiseerde ontvangers voor specifieke taken. Dankzij de doordachte ergonomie heeft dit systeem zich goed bewezen in topsporten en wint het aan populariteit onder piloten die strijden in de F3K-klasse van werpzweefvliegtuigen.

Een van de “jongste” modellen in de lijn van het Japanse merk. De apparatuur is gemaakt volgens een nieuw concept: rijke en flexibele functionaliteit met behulp van het goedkopere S-FHSS-protocol (ontvangers zijn dienovereenkomstig betaalbaarder). Een goede keuze voor wie het maximale uit hobbymodellen wil halen. Voor het eerst in de geschiedenis van de fabrikant beschikt het systeem over een vierde menu - specifiek voor multicopters. De gegevensoverdracht tussen zenders van hetzelfde model is draadloos. De apparatuur maakt het gebruik van geavanceerde telemetrie mogelijk - gegevens over de status van verschillende systemen van het model worden in realtime naar de grond verzonden. Er zijn extra flaptrimmers toegevoegd die indien gewenst opnieuw kunnen worden toegewezen aan besturingskanalen en functies. De gevoeligheid van alle trimmers wordt in een apart submenu aangepast.

Het klinkt gewaagd, maar de i10 is al generaties lang de droom van modelbouwers! Stel je hobbyapparatuur voor die qua functionaliteit niet onderdoet voor vlaggenschipmodellen van toonaangevende merken. Het bedrijf FlySky is erin geslaagd dit idee tot leven te brengen - sterker nog, het verschil met de topsportradiobesturingssystemen zit hem alleen in een lagere verwerkingssnelheid en een iets lagere nauwkeurigheid, terwijl het tegelijkertijd kan voldoen aan de behoeften van de meest veeleisende gebruikers. Voor het eerst in de geschiedenis maakt de zender gebruik van het Android-besturingssysteem. Alle functies worden rijkelijk geïllustreerd en weergegeven op het kleurentouchscreen. Telemetrie is beschikbaar en dankzij een seriële verbinding kunt u zelfs metingen krijgen van dezelfde sensoren die verantwoordelijk zijn voor verschillende systemen van het model. Het menu van i10-systemen aangeboden door ons bedrijf is vertaald in het Russisch! Werkt met AFHDS 2-, AFHDS 2A- en AFHDS-ontvangers.
Vlaggenschip radiobesturingssystemen
De systemen waar we het in deze categorie kort over zullen hebben, lopen voorop in de vooruitgang op het gebied van RC-modellering en hebben maximale functionaliteit. We zullen verschillende voordelen en functies niet benadrukken - er zijn er te veel om in het formaat van een kort overzichtsartikel te passen. Wij raden u aan onderstaande volledige beschrijvingen van de draadloze besturingssystemen te lezen!

Het vlaggenschip van de lijn van radiobesturingssystemen voor vliegtuigmodellen van het Japanse bedrijf Futaba. Het eerste 18-kanaals besturingssysteem in de geschiedenis van het merk. De hoogfrequente module werkt in de modi FASST, FASSTest (met telemetrie) en S-FHSS. De zender maakt gebruik van een speciaal ontwikkeld besturingssysteem en is voorzien van een groot kleurentouchscreen. De hoge kenmerken en mogelijkheden van het 18MZ-systeem zijn bevestigd door atleten van het hoogste niveau - deze uitrusting wordt gebruikt door piloten zoals 8-voudig wereldkampioen in de FAI F3A-klasse Christophe Paysant-Le Roux (Frankrijk) en onze landgenoot, drie -tijdwinnaar van het Jet World-toernooi Masters (wereldkampioen in de jetreplicaklasse volgens IJMC), Vitaly Robertus.

In 2016 reageerde Futaba Corporation op de wensen van modelbouwers van over de hele wereld die geen compromissen kenden bij het kiezen van radiobesturingsapparatuur, maar niet bereid waren om 18MZ te kopen vanwege de hoogste prijs op de markt. De 18SZ komt qua mogelijkheden zo dicht mogelijk bij het vlaggenschip - de verschillen zitten in het kleinere aantal mixers, tuimelschakelaars en knoppen en een kleiner display. Het menu is verbeterd om het nog begrijpelijker te maken. Ook toegevoegd is een multicopter-menu en een nieuw protocol voor gegevensoverdracht (naast de bestaande drie) - T-FHSS, dat het gebruik van telemetrie op relatief goedkope ontvangers mogelijk maakt. Eén zender voor alle modellen, van de eenvoudigste tot topsportuitrusting - erg handig!
*Om de kosten van dure radiobesturingsapparatuur niet te verminderen, kunt u bij het trainen op een simulator er een aanschaffen die de ergonomie en functies van de zender repliceert.
Ondanks het feit dat quadcopters een uiterst modieus onderwerp zijn, is het kiezen van componenten om je toestel in elkaar te zetten nog steeds niet zo eenvoudig. Onderdelen selecteren voor een specifiek project is een pijnlijke zoektocht naar de optimale combinatie van gewicht, kracht en functionaliteit. Laten we daarom, voordat we ons in de wereld van talloze online winkels en naamloze Chinese fabrikanten storten, het voorbereidende werk doen.
Wat is een quadcopter en waarom is deze nodig?
Multirotors, ook wel multicopters of simpelweg copters genoemd, zijn onbemande luchtvaartuigen die zijn ontworpen voor entertainment, het maken van foto's en video's vanuit de lucht of het testen van geautomatiseerde systemen.
Copters onderscheiden zich meestal door het aantal gebruikte motoren - variërend van een bicopter met twee motoren (zoals GunShip uit de film Avatar) tot een octacopter met acht. In feite wordt het aantal motoren alleen beperkt door uw verbeeldingskracht, budget en de mogelijkheden van de vluchtcontroller. De klassieke versie is een quadcopter met vier motoren op kruisende balken. De Fransman Étienne Oehmichen probeerde in 1920 een dergelijke configuratie te bouwen, en in 1922 slaagde hij daar zelfs in. In wezen is dit de gemakkelijkste en goedkoopste optie om een vliegtuig te maken dat kleine camera's zoals een GoPro gemakkelijk de lucht in kan tillen. Maar als je gaat opstijgen met serieuze foto- en videoapparatuur, dan moet je een helikopter met een groot aantal motoren kiezen - dit vergroot niet alleen het laadvermogen, maar verhoogt ook de betrouwbaarheid als een of meer motoren tijdens de vlucht uitvallen .
Vlucht theorie
In de vliegtheorie (aerodynamica) is het gebruikelijk om drie hoeken (of drie rotatieassen) te onderscheiden, die de oriëntatie en richting van de bewegingsvector van het vliegtuig bepalen. Simpel gezegd: het vliegtuig ‘kijkt’ ergens en beweegt ergens naartoe. Bovendien beweegt hij zich mogelijk niet in de richting waarin hij ‘kijkt’. Zelfs vliegtuigen tijdens de vlucht hebben een soort ‘drift’-component die hen uit hun koersrichting haalt. En helikopters kunnen over het algemeen zijwaarts vliegen.
Deze drie hoeken worden gewoonlijk rollen, stampen en gieren genoemd. Rol is de rotatie van het voertuig rond zijn lengteas (de as die loopt van neus tot staart). De toonhoogte is een rotatie rond zijn dwarsas (pikt in zijn neus, tilt zijn staart op). Yaw is een rotatie rond een verticale as, die het meest lijkt op rotatie in de ‘grond’-zin.
Basismanoeuvres (van links naar rechts): rechtdoor, rollen/pitch en gieren
In het klassieke helikopterontwerp regelt de hoofdrotor het rollen en stampen met behulp van een bladtuimelschijf. Omdat de hoofdrotor een luchtweerstand heeft die niet nul is, ondervindt de helikopter een koppel dat is gericht in de richting tegengesteld aan de rotatie van de rotor, en om dit te compenseren heeft de helikopter een staartrotor. Door de prestaties van de staartrotor (omwentelingen of spoed) te veranderen, regelt een klassieke helikopter zijn gierbeweging. In ons geval is alles ingewikkelder. We hebben vier schroeven, waarvan er twee met de klok mee draaien, twee tegen de klok in. De meeste configuraties maken gebruik van propellers met een vaste spoed en kunnen alleen worden geregeld op basis van hun snelheid. Als ze allemaal met dezelfde snelheid roteren, heffen ze elkaar op: gieren, rollen en stampen zijn nul.

Als we het toerental van de ene met de klok mee draaiende propeller verhogen en het toerental van de andere met de klok mee draaiende propeller verlagen, dan handhaven we het totale koppel en zal de gier nog steeds nul zijn, maar rollen of stampen (afhankelijk van waar we zijn “neus” doen) zal wijziging. En als we de snelheid verhogen van beide propellers die met de klok mee draaien, en de snelheid verlagen van de propellers die tegen de klok in draaien (om de totale lift te behouden), dan ontstaat er een koppel dat de gierhoek verandert. Het is duidelijk dat dit alles niet door ons zelf zal worden gedaan, maar door een boordcomputer die een signaal van de stuurknuppels zal ontvangen, correcties van de accelerometer en gyroscoop zal toevoegen en indien nodig aan de schroeven zal draaien. Om een helikopter te ontwerpen, is het noodzakelijk om een balans te vinden tussen gewicht, vliegtijd, motorvermogen en andere kenmerken. Dit alles hangt af van specifieke taken. Iedereen wil dat een quad hoger, sneller en langer vliegt, maar de gemiddelde vliegtijd ligt tussen de 10 en 20 minuten, afhankelijk van de accucapaciteit en het totale vlieggewicht. Het is de moeite waard eraan te denken dat alle kenmerken met elkaar verbonden zijn en dat een toename van de batterijcapaciteit bijvoorbeeld zal leiden tot een toename van het gewicht en, als gevolg daarvan, een afname van de vliegtijd. Om erachter te komen hoe lang uw constructie ongeveer in de lucht zal blijven hangen en of deze überhaupt van de grond zal kunnen komen, is er een goede online calculator ecalc.ch. Maar voordat u er gegevens in invoert, moet u de vereisten voor het toekomstige apparaat formuleren. Ga je een camera of andere apparatuur op het apparaat installeren? Hoe snel moet het apparaat zijn? Hoe ver moet je vliegen? Laten we eens kijken naar de kenmerken van de verschillende componenten.
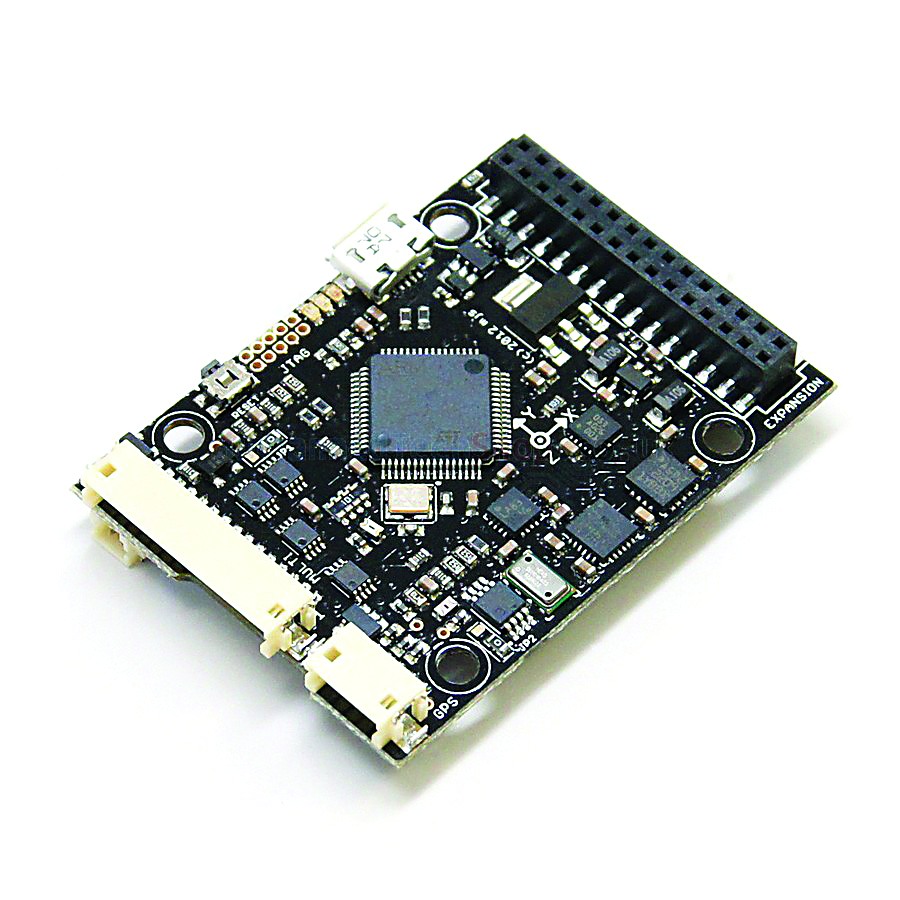 PX4 - boordcomputer met een volledig UNIX-systeem
PX4 - boordcomputer met een volledig UNIX-systeem Kader
Het belangrijkste punt dat u moet beslissen bij het kiezen van een lijst, is of u een kant-en-klare lijst gebruikt of er zelf een maakt. Met een kant-en-klaar frame is alles eenvoudiger en zul je in ieder geval veel onderdelen moeten bestellen. Tegelijkertijd kan de zelfgemaakte optie, gezien de prijzen in Chinese winkels, duurder zijn. Aan de andere kant is het gemakkelijker om uw eigen frame te repareren bij een ongeval. Natuurlijk kun je elk ontwerp, zelfs het gekste, met je eigen handen maken. Laten we de optie voor zelfmontage eens nader bekijken.
Je kunt een frame maken van alle beschikbare materialen (hout, aluminium, plastic, enzovoort). Je kunt het iets serieuzer aanpakken en het op een CNC-machine uit geweven koolstofvezel snijden, en je kunt de taak ingewikkelder maken en een vouwstructuur maken.
De gemakkelijkste optie voor doe-het-zelvers is om naar OBI, Leroy Merlin of de bouwmarkt te gaan en een vierkante aluminium buis van 12 × 12 te kopen, evenals een aluminiumplaat van 1,5 mm dik. Om een frame te maken van dergelijke materialen van het type "vier stokken en bevestigingsmiddelen", is een boormachine of een ijzerzaag voor metaal voldoende. Maar je moet erop voorbereid zijn dat een dergelijk ontwerp niet lang zal duren. Toch zijn al deze profielen gemaakt van zeer zacht materiaal (AD31/AD33), dat gemakkelijk zal buigen tijdens vluchten.
 Oehmichen nr. 2, een bemande quadcopter van de Franse ingenieur Etienne Oehmichen, gelanceerd in 1922
Oehmichen nr. 2, een bemande quadcopter van de Franse ingenieur Etienne Oehmichen, gelanceerd in 1922 Als voorbeeld voor uw frame kunt u een vereenvoudigd fabrieksframe nemen of een kant-en-klare tekening op internet vinden. Complexere materialen (bijvoorbeeld koolstofvezel) kunnen worden vervangen door aluminium - als het zwaarder blijkt te zijn, zal dat niet veel zijn. In ieder geval moet u letten op de lengte en symmetrie van de stralen. De lengte van de balken wordt gekozen op basis van de diameter van de gebruikte propellers, zodat na installatie de afstand tussen de cirkels van de roterende propellers minimaal 1 à 2 cm bedraagt, en meer nog, deze cirkels mogen elkaar niet kruisen. Motoren die op de armen zijn gemonteerd, moeten zich op gelijke afstand van het midden van het frame bevinden, waar de "hersenen" zich zullen bevinden, en (in de meeste gevallen) op dezelfde afstand van elkaar, waardoor een gelijkzijdige veelhoek ontstaat.
Bij het ontwerpen is het de moeite waard om er rekening mee te houden dat het midden van het frame moet samenvallen met het zwaartepunt, dus het plaatsen van een batterij aan de achterkant tussen de balken is een slecht idee, tenzij dit wordt gecompenseerd door een belasting aan de voorkant, zoals een camera. . Bedenk waar uw apparaat op zal landen; voor beginners kunt u adviseren iets zachts op de "buik" of de uiteinden van de armen te gebruiken, bijvoorbeeld dicht schuimrubber of tennisballen. En bescherm de accu ook bij een mislukte landing, door deze bijvoorbeeld tussen de frameplaten te plaatsen of onder hoge landingsski’s te plaatsen.
informatie
Vliegen in First Person View (FPV) is erg spannend, vooral als je een videobril en HeadTracker gebruikt, die de bewegingen van je hoofd op de FPV-camera-cardan volgen, waardoor het gevoel ontstaat dat je in de cockpit zit.
Motoren en propellers
Vanwege de rotatie van de motoren in verschillende richtingen is het noodzakelijk om multidirectionele propellers te gebruiken: voorwaartse rotatie (tegen de klok in) en omgekeerde rotatie (met de klok mee). Meestal worden tweebladige propellers gebruikt, deze zijn gemakkelijker te balanceren en te vinden in de winkels, terwijl driebladige propellers meer stuwkracht zullen geven met een kleinere propellerdiameter, maar veel hoofdpijn zullen veroorzaken bij het balanceren. Een slechte (goedkope en ongebalanceerde) propeller kan tijdens de vlucht uit elkaar vallen of sterke trillingen veroorzaken die worden doorgegeven aan de sensoren van de vluchtcontroller. Dit zal leiden tot ernstige problemen met de stabilisatie en zal veel onscherpte en “gelei” in de video veroorzaken als je iets filmt vanuit een quadcopter of vliegt in first person view.
Snelheidsregelaar,ook wel ESC genoemd
Elke propeller heeft twee hoofdparameters: diameter en spoed. Ze worden afwisselend aangeduid als 10 x 4,5, 10 x 45 of eenvoudigweg 1045. Dit betekent dat de propeller een diameter heeft van 10 inch en een spoed van 4,5 inch. Hoe langer de propeller en hoe groter de spoed, hoe meer stuwkracht deze kan creëren, maar tegelijkertijd zal de belasting van de motor toenemen en zal het stroomverbruik toenemen, waardoor deze oververhit kan raken en de elektronica uitvalt. Daarom zijn de schroeven afgestemd op de motor. Nou ja, of een motor voor propellers, het is maar hoe je het bekijkt. Meestal kunt u op de websites van motorverkopers informatie vinden over aanbevolen propellers en batterijen voor de geselecteerde motor, evenals tests van de gegenereerde stuwkracht en efficiëntie. Er zijn ook propellers met variabele spoed, die in theorie de manoeuvreerbaarheid vergroten, maar in werkelijkheid complexe mechanica toevoegen die de neiging hebben te verslijten en kapot te gaan, gevolgd door dure reparaties.
Hoe groter de propeller, hoe groter de traagheid ervan. Als je manoeuvreerbaarheid nodig hebt, is het beter om propellers met een grote spoed of drie bladen te kiezen. Met dezelfde grootte creëren ze 1,2 tot 1,5 keer meer stuwkracht. Het is duidelijk dat de propellers en hun rotatiesnelheid zo moeten worden gekozen dat ze een stuwkracht kunnen creëren die groter is dan het gewicht van het apparaat.
En tot slot borstelloze motoren. Motoren hebben een belangrijke parameter: kV. Dit is het aantal omwentelingen per minuut dat de motor zal maken per volt aangelegde spanning. Dit is niet het vermogen van de motor, het is, om zo te zeggen, de ‘overbrengingsverhouding’. Hoe lager de kV, hoe lager de snelheid, maar hoe hoger het koppel. Hoe meer kV bij hetzelfde vermogen, hoe hoger het toerental en hoe lager het koppel. Bij het kiezen van een motor laten ze zich leiden door het feit dat deze in de normale modus op 50% van het maximale vermogen zal werken. Denk niet dat hoe hoger de kV, hoe beter; voor helikopters met een typische 3S-batterij ligt het aanbevolen aantal in het bereik van 700 tot 1000 kV.
informatie
Een duurzamer materiaal is duraluminium (D16T). Het buigt praktisch niet, is behoorlijk veerkrachtig en wordt gebruikt in de luchtvaart. Profielen ervan worden niet bij OBI verkocht, maar je kunt ze vinden op de Mitinsky-markt op de derde verdieping; ze waren ook op de Stroy TVC-markt.
Vermogen en vermogensregelaars
De kapitein suggereert: hoe groter het motorvermogen, hoe meer batterij er nodig is. Bij een grote batterij gaat het niet alleen om de capaciteit (lees: vliegtijd), maar ook om de maximale stroom die hij levert. Maar hoe groter de batterij, hoe groter het gewicht, wat ons dwingt onze schattingen met betrekking tot propellers en motoren aan te passen. Tegenwoordig gebruikt iedereen lithium-polymeerbatterijen (LiPo). Ze zijn licht, ruim en hebben een hoge ontlaadstroom. Het enige negatieve is dat ze niet goed werken bij temperaturen onder het vriespunt, maar als je ze in je zak bewaart en ze vlak voor de vlucht aansluit, dan worden ze tijdens de ontlading zelf een beetje warm en hebben ze geen tijd om te bevriezen. LiPo-cellen produceren een spanning van 3,7 V.
Bij het kiezen van een batterij moet u op drie van de parameters letten: capaciteit, gemeten in milliampère-uur, maximale ontlaadstroom in de batterijcapaciteit (C) en het aantal cellen (S). De eerste twee parameters zijn met elkaar verbonden, en als je ze vermenigvuldigt, zul je ontdekken hoeveel stroom deze batterij lange tijd kan leveren. Uw motoren verbruiken bijvoorbeeld elk 10 A en er zijn er vier, en de batterij heeft parameters van 2200 mAh 30/40C, dus de helikopter heeft 4 10 A = 40 A nodig en de batterij kan 2,2 A 30 = 66 A produceren of 2,2 A 40 = 88 A gedurende 5–10 seconden, wat duidelijk voldoende zal zijn om het apparaat van stroom te voorzien. Bovendien hebben deze coëfficiënten rechtstreeks invloed op het gewicht van de batterij. Aandacht! Als er niet genoeg stroom is, zal de batterij in het beste geval opblazen en defect raken, en in het slechtste geval zal hij in brand vliegen of exploderen; dit kan ook gebeuren als er sprake is van kortsluiting, schade of onjuiste opslag- en oplaadomstandigheden. Gebruik daarom speciale opladers, bewaar batterijen in speciale niet-brandbare zakken en vlieg met een "pieper" die waarschuwt voor ontlading. Het aantal cellen (S) geeft het aantal LiPo-cellen in de batterij aan, elke cel produceert 3,7 V en een 3S-batterij levert bijvoorbeeld ongeveer 11,1 V. Het is de moeite waard om op deze parameter te letten, omdat de snelheid afhangt daarop het motortoerental en het type regelaars dat wordt gebruikt.
Batterij-elementen worden in serie of parallel gecombineerd. Bij serieschakeling neemt de spanning toe, bij parallelschakeling neemt de capaciteit toe. Het aansluitschema van de elementen in de batterij is te begrijpen aan de hand van de markeringen. 3S1P (of eenvoudigweg 3S) bestaat bijvoorbeeld uit drie in serie geschakelde elementen. De spanning van zo'n batterij zal 11,1 V zijn. 4S2P bestaat uit acht elementen, twee groepen, parallel verbonden met vier seriële elementen.
De motoren zijn echter niet rechtstreeks op de accu aangesloten, maar via zogenaamde snelheidsregelaars. Snelheidsregelaars (ook wel ESC's genoemd) regelen de rotatiesnelheid van de motoren, waardoor uw helikopter op zijn plaats balanceert of in de gewenste richting vliegt. De meeste regelaars hebben een ingebouwde 5V-stroomregelaar, van waaruit je de elektronica (met name de ‘hersenen’) van stroom kunt voorzien, of je kunt een aparte stroomregelaar (UBEC) gebruiken. Snelheidsregelaars worden geselecteerd op basis van het stroomverbruik van de motor, evenals de mogelijkheid om te knipperen. Conventionele controllers reageren vrij traag op het binnenkomende signaal en hebben veel onnodige instellingen voor de constructie van de helikopter, dus worden ze geflashed met aangepaste SimonK- of BLHeli-firmware. Ook hier zijn de Chinezen te hulp gekomen, en je kunt vaak snelheidsregelaars vinden met al bijgewerkte firmware. Vergeet niet dat dergelijke regelaars de toestand van de batterij niet controleren en deze onder de 3,0 V per cel kunnen ontladen, wat tot schade zal leiden. Maar tegelijkertijd is het bij conventionele ESC's de moeite waard om het gebruikte type batterij over te schakelen van LiPo naar NiMH of om de snelheidsvermindering uit te schakelen wanneer de stroombron wordt ontladen (volgens de instructies), zodat aan het einde van de vlucht de motor slaat niet plotseling af en je drone valt niet.
De motoren zijn met drie draden verbonden met de snelheidsregelaar, de volgorde doet er niet toe, maar als je twee van de drie draden verwisselt, draait de motor in de tegenovergestelde richting, wat erg belangrijk is voor helikopters.
De twee voedingsdraden die uit de regelaar komen, moeten op de accu worden aangesloten. VERWAR DE POLARITEIT NIET! Over het algemeen zijn de regelaars voor het gemak niet op de batterij zelf aangesloten, maar op de zogenaamde Power Distribution Module - een energiedistributiemodule. Dit is over het algemeen slechts een bord waarop de stroomdraden van de regelaars worden gesoldeerd, de vertakkingen daarvoor worden gesoldeerd en de stroomkabel die naar de batterij gaat, wordt gesoldeerd. Uiteraard hoeft de batterij niet gesoldeerd te worden, maar moet deze via een connector worden aangesloten. U wilt de batterij niet elke keer opnieuw solderen als deze leeg is.
Boordcomputer en sensoren
De keuze aan vluchtcontrollers voor helikopters is erg groot - van de eenvoudige en goedkope KapteinKUK en verschillende open source-projecten voor Arduino-compatibele controllers tot de dure commerciële DJI Wookong. Als je een echte hacker bent, dan zouden gesloten controllers je niet veel moeten interesseren, terwijl open projecten, en zelfs die gebaseerd op de populaire Arduino, veel programmeurs zullen aantrekken. De mogelijkheden van elke vluchtcontroller kunnen worden beoordeeld aan de hand van de sensoren die erin worden gebruikt:
De gyroscoop zorgt ervoor dat je de helikopter onder een bepaalde hoek kunt houden en is bij alle controllers inbegrepen; de versnellingsmeter helpt bij het bepalen van de positie van de helikopter ten opzichte van de grond en lijnt deze evenwijdig aan de horizon uit (comfortabele vlucht); De barometer maakt het mogelijk om het apparaat op een bepaalde hoogte te houden. De metingen van deze sensor worden sterk beïnvloed door de luchtstromen van de propellers, dus je moet hem verbergen onder een stuk schuimrubber of spons; Het kompas en de GPS voegen samen functies toe zoals koers vasthouden, positie vasthouden, terugkeren naar startpunt en routetoewijzingen (autonome vlucht). Je moet de installatie van het kompas zorgvuldig benaderen, omdat de metingen sterk worden beïnvloed door nabijgelegen metalen voorwerpen of stroomdraden. Daarom zullen de "hersenen" niet in staat zijn de juiste bewegingsrichting te bepalen; sonar of ultrasone afstandsmeter wordt gebruikt voor nauwkeuriger hoogtebehoud en autonome landing; de optische sensor van de muis wordt gebruikt om de positie op lage hoogte te behouden; Stroomsensoren bepalen de resterende batterijlading en kunnen terugkeer naar start- of landingsfuncties activeren.
Er zijn momenteel drie belangrijke open source-projecten: MultiWii, ArduCopter en de geporteerde versie MegaPirateNG. MultiWii is de eenvoudigste en vereist een Arduino met een 328p-, 32u4- of 1280/2560-processor en ten minste één gyroscoopsensor. ArduCopter is een project boordevol functionaliteit, van eenvoudig zweven tot het uitvoeren van complexe routetaken, maar vereist speciale hardware op basis van twee ATmega-chips. MegaPirateNG is een ArduCopter-kloon die kan draaien op een gewone Arduino met een 2560-chip en een minimale set sensoren, waaronder een gyroscoop, versnellingsmeter, barometer en kompas. Ondersteunt dezelfde functies als het origineel, maar loopt altijd voorop in de ontwikkeling.
Geavanceerde negen-kanaal afstandsbediening
De situatie met hardware voor open projecten is vergelijkbaar, net als met frames voor helikopters, dat wil zeggen dat je een kant-en-klare controller kunt kopen of deze zelf helemaal opnieuw kunt samenstellen of op basis van Arduino. Voordat u koopt, moet u altijd letten op de sensoren die in het bord worden gebruikt, omdat de technologische ontwikkeling niet stilstaat en de oude op de een of andere manier aan de Chinezen moeten worden verkocht, en bovendien kunnen niet alle sensoren worden ondersteund door open firmware.
Ten slotte is het de moeite waard om nog een computer te noemen: de PX4, die verschilt van de Arduino-klonen doordat deze een UNIX-achtig real-time besturingssysteem heeft, met een shell, processen en zo. Maar we moeten je waarschuwen dat PX4 een nieuw en nogal grof platform is. Hij zal niet onmiddellijk na montage vliegen.
Het instellen van vluchtparameters, zoals het setup-programma, is voor elk project zeer individueel, en de theorie daarover zou een ander artikel kunnen vergen, dus kort gezegd: bijna alle firmware voor multicopters is gebaseerd op een PID-controller en de belangrijkste parameter die interventie vereist is de proportionele component, aangeduid als P of rateP. Als je helikopter tijdens het opstijgen heen en weer beweegt, moet deze waarde worden verlaagd, maar als hij traag reageert op invloeden van buitenaf, verhoog hem dan juist; andere nuances kun je vinden in de instructies en op de websites van de ontwikkelaars.
Veiligheid
Alle beginners, als ze aan veiligheid denken, denken aan de AR.Drone en zijn propellerbescherming. Dit is een goede optie, en het werkt, maar alleen op kleine en lichte apparaten, en wanneer het gewicht van je helikopter twee kilogram begint te naderen of dit cijfer al lang overschrijdt, dan kan alleen een sterke ijzeren structuur je redden, die zal wegen veel en, zoals je ziet, zal het het laadvermogen en de vluchtautonomie aanzienlijk verminderen. Daarom is het beter om eerst te trainen, weg van mensen en eigendommen die beschadigd kunnen raken, en naarmate uw vaardigheden verbeteren, zal bescherming niet langer nodig zijn. Maar zelfs als u een ervaren piloot bent, vergeet dan de veiligheidsmaatregelen niet en denk na over de mogelijke negatieve gevolgen van uw vlucht in noodsituaties, vooral als u op drukke plaatsen vliegt. Vergeet niet dat een storing in de controller of het communicatiekanaal ertoe kan leiden dat het apparaat ver van u weg vliegt, en dat er dan een GPS-tracker vooraf op de helikopter is geïnstalleerd, of een eenvoudige maar zeer luide pieper, waarvan u het geluid hoort kan de locatie ervan bepalen. Stel vooraf de fail-safe-functie van uw vluchtcontroller in en controleer deze, die u zal helpen bij het landen of terugbrengen van de helikopter naar het startpunt als het signaal van de afstandsbediening wegvalt.
Controle
Iets over radioapparatuur. Tegenwoordig werken vrijwel alle zenders voor vliegmodellen op een frequentie van 2,4 GHz. Ze hebben een vrij groot bereik en dit frequentiebereik is niet zo luidruchtig als bijvoorbeeld 900 MHz. Voor de vlucht zijn over het algemeen vier kanalen voldoende: gas geven, gieren, stampen en rollen. Acht kanalen zijn zeker genoeg voor iets anders.
informatie
Als je met een camera wilt vliegen, heb je een cardanische ophanging nodig die de camera tijdens manoeuvres parallel aan de horizon houdt en ook helpt de kanteling van de camera te regelen. De meeste controllers hebben uitgangen voor het stabiliseren van servogestuurde cardanische ophangingen, evenals een uitgang voor een bedieningsschakelaar voor de sluiterknop van de camera.
De kit bestaat meestal uit de afstandsbediening zelf en de ontvanger. De ontvanger bevat bedieningsknoppen en extra knoppen. Normaal gesproken wordt Mode2-apparatuur geselecteerd, waarbij de linker joystick het gas en de rotatie regelt, en de rechter joystick de kanteling van de helikopter. Alle hendels, behalve het gaspedaal, zijn veerbelast en keren terug naar hun oorspronkelijke positie wanneer ze worden losgelaten. Het is ook de moeite waard om aandacht te besteden aan het aantal kanalen. De drone heeft vier besturingskanalen nodig en één kanaal voor het schakelen tussen vliegmodi, en er kunnen ook extra kanalen nodig zijn voor camerabesturing, voor configuratie of voor speciale vluchtcontrollermodi. Wanneer u een afstandsbediening kiest, moet u ook rekening houden met de mogelijkheid om de radiomodule te wijzigen, zodat deze in de toekomst eenvoudig kan worden bijgewerkt.
Gegroet, beste UAV-liefhebbers. Een camera voor een quadcopter is, zo niet verplicht, dan wel een uiterst wenselijk kenmerk. De meeste drones kunnen het aan boord dragen, en de beste vliegtuigmodellen kunnen worden gebruikt voor professionele video-opnames vanuit de lucht. Naast het maken van foto's en video's worden camera's veel gebruikt voor FPV-besturing, waardoor de vlucht van de helikopter nauwkeuriger kan worden gecontroleerd. De belangrijkste nuances bij het kiezen en gebruiken van videoapparatuur worden in ons artikel besproken.
Een dronecamera kan worden gebruikt om veel problemen op te lossen, die zijn onderverdeeld in 2 mondiale groepen:
- Foto- en video-opnamen, evenals een overzicht van het gebied waarover de drone vliegt
- FPV-besturing
Geavanceerde vliegtuigmodellen kunnen twee camera's (of zelfs meer) tegelijkertijd gebruiken. Eén biedt FPV-controle, terwijl de tweede opnamen van hoge kwaliteit biedt. Deze verdeeldheid is niet toevallig ontstaan. Actiecamera's, vaak gemonteerd op drones, kunnen meestal alleen opnemen, maar kunnen geen videosignaal naar een monitor verzenden. Of ze doen het met enkele beperkingen. Het probleem wordt opgelost door FPV-apparatuur aan te schaffen.
Fabrikanten als Walkera, DJI, Xiaomi en enkele anderen rusten hun quadcopters uit met universele apparatuur die zowel videosignalen kan opnemen als verzenden. Het nadeel in dit geval is dat de opnames in digitaal formaat worden uitgevoerd, algoritmen voor beeldcompressie worden gebruikt en dat de gegevens pas na verwerking door de processor worden verzonden.
Dit alles leidt tot vertraging. Voor ontspannen buitenvluchten is een seconde vertraging niet kritisch. Zo'n video is niet echt te noemen en hoewel de helikopterfabrikant FPV-besturing belooft, ontvangt de piloot het signaal in werkelijkheid niet onmiddellijk.
Analoge FPV-kits voor quadcopters werken met minimale latentie. De videostream wordt niet verwerkt, maar direct doorgestuurd naar de besturingsapparatuur. Voor het racen met drones, voor het vliegen rond een groot aantal potentiële obstakels (bijvoorbeeld dichte stedelijke gebieden, bossen), voor professionele video-opnamen is dit allemaal van groot belang.
Er is nog een belangrijk punt. FPV-apparatuur verbruikt weinig energie, weegt weinig, is zeer betrouwbaar en heeft een redelijk betaalbare prijs.
De keuze wordt dus bepaald door de taken die zullen worden opgelost. Voor opnamen van hoge kwaliteit moet een goede actiecamera met een 3-assige cardanische ophanging in het pakket worden meegeleverd, terwijl voor echte first-person besturing analoge FPV-apparatuur vereist is.
Voor het opnemen van video
Veel piloten kopen of assembleren zelf UAV's en installeren er pas daarna actiecamera's op. Even later zullen we het hebben over quadcopter-modellen die in de fabriek zijn uitgerust met videocamera's.

Ooit creëerden GoPro-apparaten een nieuwe markt voor draagbare schokbestendige en waterdichte videocamera's. Nu zijn er tientallen bedrijven op aanwezig. We hebben een aantal populaire modellen geselecteerd die vaak worden gebruikt voor het opnemen van video's.
Topactiecamera's voor drones
Onze kleine topactiecamera's omvatten 3 apparaten die relatief goedkoop zijn en uitgerust met Wi-Fi-modules. Met hun hulp kun je goedkope quadcopters gebruiken om video's van hoge kwaliteit te maken.

We zijn geïnteresseerd in:
- Amkov amk5000
- Xiaomi YI-actie 4K
- Sjcam sj4000 wifi
Amkov amk5000
De Amkov amk5000 wifi-actiecamera is een van de goedkoopste apparaten. De kosten in Chinese online winkels bedragen ongeveer $ 90. De leveringsset is exhaustief te noemen. Naast een verscheidenheid aan adapters, grendels en pads bevat het pakket een waterdichte doos. Er is ook een helmhouder, dat wil zeggen dat het toepassingsgebied van de amk5000 zeer uitgebreid is en duidelijk niet beperkt is tot alleen vluchten.

Zoals de naam al aangeeft, is de camera uitgerust met een wifi-module. De gebruiker kan het apparaat bedienen met behulp van een smartphone. En hoewel het communicatiebereik niet groter is dan 50 meter, is dit voldoende om de camera pas na het opstijgen te activeren of uit te schakelen vóór de landing.
Belangrijkste kenmerken:
- Afmetingen 65x73x139 mm
- Gewicht 78 gram
- 14 MP CMOS-beeldsensor
- Kijkhoek 170 graden
- Speelduur tot 90 minuten in 1080 30p-modus met Wi-Fi
- Timelapse-functie
- Micro-HDMI- en micro-USB 2.0-connectoren
- Slot voor SD- en SDHC-kaarten
De opnamekwaliteit kan omschreven worden als gemiddeld. De lens mist duidelijk een diafragma, wat vooral merkbaar is bij bewolkt weer. Aan de andere kant is het onwaarschijnlijk dat je voor $ 100 een betere optie zult vinden, en zelfs met zo'n rijke uitrusting. Van de actiecamera's op instapniveau is Amkov amk5000 wifi een van de beste. Brede kijkhoeken zorgen ervoor dat u niets mist.
Merk op dat de amk5000 qua uiterlijk de Hero kopieert, wat echter niet verrassend is.
Xiaomi YI-actie 4K
Het Xiaomi YI action 4K-model is een doorontwikkeling van de YI-lijn en is momenteel een van de meest geavanceerde actiecamera's van de Chinese elektronicafabrikant. Traditioneel is de leveringsomvang voor Xiaomi bescheiden.

Naast YI action 4K bevat het een selfiestick en een Bluetooth-afstandsbediening. Er zijn geen steunen, onderwaterhuizen of adapters. Uiteraard kunnen eventuele adapters afzonderlijk worden aangeschaft, maar vergeleken met meer betaalbare concurrenten ziet het pakket er mager uit.
Het apparaat kost ongeveer $200, is niet de goedkoopste videocamera, maar ondersteunt opnames in 4K-resolutie en staat bekend om een redelijk hoge beeldkwaliteit.
Belangrijkste kenmerken:
- Afmetingen 65x42x21 mm
- Gewicht 95 gram
- Kijkhoek 155 graden
- Beeldsensor CMOS ½,3″ 12 MP (Sony IMX377)
- Elektronische stabilisatie
- Processor Ambarella A9SE75
- Diafragma F2.8
- Bedrijfstijd tot 110 minuten in 3840×2160 30p-modus
- Timelapse-functie
- Micro-USB-connector
- Broadcom BCM43340 dual-band wifi-module
- Sleuf voor microSDHC/SDXC-kaarten
Xiaomi YI action 4K kan zelfs worden gebruikt voor FPV-besturing door “Live videomodus” te selecteren in het applicatiemenu. Het is waar dat het communicatiebereik niet groter is dan 50 meter, dus je kunt niet ver vliegen.
Video opnemen met Xiaomi YI is helemaal niet moeilijk. Instellingen, waaronder geavanceerde, zijn beschikbaar in het applicatiemenu, maar je kunt ook gebruik maken van het hoogwaardige touchscreen van de camera zelf. Alle opnamemodi werken feilloos. Elektronische stabilisatie zorgt voor vloeiendere beelden, maar resulteert in kleinere framegroottes.
Sjcam sj4000 wifi
De Sjcam sj4000 wifi-actiecamera, onlangs uitgebracht in de nieuwe revisie 2.0, onderscheidt zich door zijn lage kosten (ongeveer $ 80), rijke uitrusting en de aanwezigheid van een 2-inch scherm. De kit bevat verschillende houders, een waterdichte behuizing en zelfs een geheugenkaart van 32 GB.
 Belangrijkste kenmerken:
Belangrijkste kenmerken:
- Afmetingen 60x41x30 mm
- Gewicht 46 gram
- Kijkhoek 170 graden
- Beeldsensor Aptina0330 CMOS 3 MP
- Elektronische stabilisatie
- Speelduur tot 88 minuten in 1920×1080 30p-modus
- Timelapse-functie
- Bewegingsdetector
- Micro-USB- en micro-HDMI-connectoren
- Wi-Fi-module
- Slot voor microSDHC-kaarten
Dit is een van de lichtste actiecamera's uit de review en weegt inclusief batterij slechts 46 gram. De kwaliteit van de opnames kan als gemiddeld worden beoordeeld. Bij weinig licht lijkt het beeld donker (een veelvoorkomend probleem bij kleine lenzen). 30 fps bij 1920x1080 is de limiet voor de sj4000. In de instellingen kun je de kijkhoek veranderen, maar dit leidt alleen maar tot een slechter beeld.
Over het algemeen is de sj4000 redelijk goed voor het geld. Het kan op budget-quadcopters worden geïnstalleerd om uw eigen vluchten te filmen. Het lichte gewicht vermindert de draagcapaciteit van de drone.
Voor FPV

Een complete FPV-kit voor een quadcopter bestaat uit:
- Zender
- Ontvanger
- Camera's met video-uitgang
- Antenne
- Monitor (helm, bril)
- Batterijen voor ontvanger en monitor
Al deze apparatuur bevindt zich op de helikopter en op het bedieningspaneel. Met geavanceerde modellen quadcopters kunt u FPV-apparatuur op uw eigen stroomvoorziening aansluiten. Hierdoor wordt de vliegtijd verkort, maar je kunt wel zonder losse accu.
Je kunt zelf een FPV-kit in elkaar zetten (en dit wordt in ons artikel besproken), maar beginnende piloten kunnen beter kiezen voor kant-en-klare drones. Er zijn zeer goedkope modellen te koop die u helpen een idee te krijgen van PDF-besturing. Het is overigens helemaal geen feit dat je het leuk vindt om een drone in de eerste persoon te besturen, dus het heeft geen zin om meteen geld uit te geven aan een dure drone.
Kant-en-klare goedkope FPV-drones
En het is in staat om aan de behoeften van zelfs zeer veeleisende klanten te voldoen.

Wij adviseren om aandacht te besteden aan:
- Hubsan H107D FPV
- WLtoys V686G
- JJRC H9D
Alle drie de modellen zijn goedkoop en uitgerust met camera's en displays. Copters kunnen niet bogen op stabiliserende cardanische ophangingen.
Hubsan H107D FPV

Dat hebben we al gedaan, dus ik zal alleen de belangrijkste kenmerken geven:
- Afmetingen 140x140x32 mm
- Gewicht 365 gram
- Vluchtduur maximaal 7 minuten
- Communicatiebereik 50-100 meter
- Videocommunicatiebereik tot 100 meter
- Ingebouwde camera 0,3 MP, resolutie 640 x 480
- Schermgrootte 4,3 inch
- Batterij 380 mAh
WLtoys V686G

- Afmetingen 360x360x100 mm
- Gewicht 860 gram
- Vluchtduur maximaal 10 minuten
- Communicatiebereik tot 150 meter
- Schermgrootte 4,3 inch
- Frequentie 2,4 GHz voor bediening en 5,8 GHz voor video
- Batterij 730 mAh
JJRC H9D

- Afmetingen 230x230x130 mm
- Gewicht 450 gram
- Vluchtduur maximaal 8 minuten
- Communicatiebereik tot 150 meter
- Videocommunicatiebereik tot 150 meter
- Videocamera 2,0 MP, HD-resolutie
- Schermgrootte 4,3 inch
- Frequentie 2,4 GHz voor bediening en 5,8 GHz voor video
- Batterij 650 mAh
Hoe je een FPV kiest en waarom het niet zo eenvoudig is
De keuze voor FPV voor een quadcopter hangt niet alleen en niet zozeer af van de prijs, maar van de kenmerken en mogelijkheden die de piloot uiteindelijk wil ontvangen.

Elke systeemcomponent heeft zijn eigen parameters en zijn eigen vereisten voor compatibele apparatuur. Waar het om gaat is het type matrix, de resolutie, de gebruikte frequentie en het zendvermogen.
U moet zich voorstellen hoe het FPV-systeem zal worden geconfigureerd, hoe u de stroomvoorziening vanaf de batterij kunt organiseren, welke monitor of helm u moet kiezen. Het is niet altijd mogelijk om een gedetailleerd overzicht van een bepaald element te vinden.
Sensortype en latentie: CCD versus CMOS
We hebben aan het begin van het artikel al kort gesproken over de vertraging. Tegenwoordig zijn er geen betaalbare oplossingen waarmee je met minimale vertraging een signaal van een digitale HD-camera naar een afstandsbediening of smartphone kunt uitzenden. Vertraging is onvermijdelijk en kan behoorlijk aanzienlijk zijn: tot enkele seconden. Elke actiecamera, zelfs de nieuwste generatie, bijvoorbeeld Hero 6, verliest in deze indicator van een goedkope FPV-camera. Zoals we al hebben gezegd: als controle door de eerste persoon nodig is, moet je alleen naar analoge videomodules kijken.
Camera's kunnen een van de twee soorten sensoren gebruiken: CMOS of CCD. Voor FPV-apparatuur worden meestal CCD-matrices gebruikt vanwege de volgende factoren:
- Betere blootstellingscontroles
- Het “gelei”-effect is minder uitgesproken
- Minder ruis bij weinig licht
CMOS (veel gebruikt in digitale HD-videocamera's) verschilt op zijn beurt:
- Hogere resolutie
- Beste kleurweergave
- Hogere framesnelheid
- Minder stroomverbruik
Voor FPV-vluchten zijn de voordelen van CMOS (afgezien van een lager energieverbruik) niet erg belangrijk. Dat is de reden waarom de beoordelingen van de beste videocamera's voor first-person-besturing oplossingen bevatten die zijn gebaseerd op CCD-matrices.
TVL-resolutie
In het tijdperk van digitale video zijn we eraan gewend dat de matrixresolutie wordt uitgedrukt in pixels (1980x1080 enzovoort). Voor analoge apparaten wordt de TVL-parameter gebruikt, dat wil zeggen het aantal horizontale lijnen dat in het frame past (of het aantal mogelijke overgangen tussen kleuren).

Hoe hoger de TVL-waarde, hoe beter de beeldkwaliteit, maar bij first-person-video is het niet nodig om de maximale waarden na te streven. Hoe hoger de resolutie, hoe hoger de prijs van de camera en, nog belangrijker, hoe hoger de videosignaalvertraging. Beperkingen worden ook opgelegd door de analoge 5,8 GHz-zender, die in staat is een bepaalde hoeveelheid gegevens per tijdseenheid te verzenden. Als de mogelijkheden van de zender beperkt zijn, maakt het niet zoveel uit hoe hoogwaardige videoapparatuur wordt gebruikt.
Dronecamera's hebben meestal een resolutie van 600TVL, 700TVL, 800TVL.
Standaard PAL\NTSC
Moderne apparatuur werkt perfect met beide formaten, dus je hoeft je er niet al te veel zorgen over te maken dat een NTSC-camera (deze standaard wordt in de VS gebruikt) incompatibel zal zijn met een Europese of Chinese zender.

Er zijn echter verschillen tussen de normen, en deze kunnen met het blote oog worden gezien door de drone op een monitor te zien vliegen.
PAL ondersteunt een hogere resolutie vergeleken met NTSC (720x576 versus 720x480), wat een positief effect heeft op de beeldkwaliteit. Maar NTSC heeft een betere framesnelheid (30 fps versus 25 fps), waardoor de video vloeiender wordt.
Topcamera's voor FPV
Er zijn tientallen, zo niet honderden dronecamera’s om uit te kiezen. De bekendste fabrikanten zijn Runcam, Foxeer, Caddx, Aomway, Boscam. Naast videoapparatuur produceren zij ook andere FPV-apparatuur.

Onze top bevat de volgende apparaten:
- Runcam Eagle 2 (volledig, micro)
- Foxeer Roofdier (Mini, Micro)
- Caddx SDR1 (Mini, Micro)
- Runcam Swift 2 (volledig, mini, micro)
- Foxeer Predator Arrow V3 (volledig, mini, micro)
- Caddx S1 (Mini, Micro)
Frequenties
De zender, die het signaal uitzendt, en de ontvanger, die dit signaal ontvangt, werken op een bepaalde frequentie. Er worden verschillende veelgebruikte frequenties gebruikt bij het modelleren van vliegtuigen, maar de frequentie die het meest wordt gebruikt voor video is 5,8 GHz.
Er zijn andere frequenties - 900, 1200, 2400 GHz. Op een frequentie van 2,4 GHz wordt de quadcopter doorgaans bestuurd. Hoe lager de frequentie, hoe groter het doordringend vermogen. Maar hoe groter de antennegrootte.
De keuze voor 5,8 GHz voor videotransmissie is niet toevallig. Deze frequentie is in veel landen legaal (het gebruik van sommige frequenties is mogelijk bij wet verboden). Daarnaast kun je een kleine antenne gebruiken, wat belangrijk is voor amateurdrones. Video-uitzendingen op 5,8 GHz hebben weinig of geen effect op de 2,4 GHz-stuurfrequentie.
Op 5,8 GHz zijn maximaal 32 kanalen beschikbaar. Dit is een belangrijke parameter als het gaat om massale gezamenlijke vluchten, bijvoorbeeld racen.
Zender en zijn kracht
Hoe hoger het zendvermogen, hoe groter het transmissiebereik van het videosignaal. Er zijn modellen te koop voor 25 mW, 100 mW, 200 mW enzovoort.

De bijzonderheid is dat om het bereik met 2 keer te vergroten, het vermogen met 4 keer moet toenemen. Als een zender van 200 mW voldoende is om video over een afstand van 1 km uit te zenden, dan moet je voor het organiseren van signaaloverdracht over 2 km een zender van 800 mW nemen. Dit is niet altijd nodig of gerechtvaardigd, terwijl de kosten van apparatuur merkbaar stijgen, evenals het energieverbruik.
Videoschakelaar
De videoschakelaar komt van pas als op het quadcoptermodel twee videocamera's zijn geïnstalleerd. De een kan bijvoorbeeld richting gaan, terwijl de tweede achterom of naar beneden kijkt. Door te schakelen kun je video vanuit verschillende bronnen op de monitor weergeven.
Ontvanger
Met de ontvanger is alles iets eenvoudiger. Het kan worden gemaakt als extern apparaat met een antenne en video-uitgang, of worden ingebouwd in een monitor of bedieningspaneel. De ontvanger moet op dezelfde frequentie en kanaal werken als de zender (meestal worden alle 32 kanalen op 5,8 GHz ondersteund). Op de ontvanger kun je een display, bril of helm aansluiten.
Antennes

Bij aanschaf van de eerste goedkope set is de piloot vaak tevreden met de antennes die bij de kit worden geleverd. Over het algemeen doen ze hun werk goed als het om korteafstandsvluchten gaat. Maar als het nodig is om een beter communicatiebereik te garanderen, worden de standaardantennes vervangen door duurdere analogen.
Soorten
De eenvoudigste sprietantennes (omnidirectionele) antennes worden meestal meegeleverd met FPV-apparatuur. Er zijn ook zogenaamde klaverantennes, gekenmerkt door een lage versterking.
Patchantennes (helixantennes) hebben het grootste bereik. Ze worden gebruikt in geavanceerde regelapparatuur.
Connectoren
Er zijn twee connectoren die de antennes verbinden met de zender en ontvanger. Dit kan een SMA-connector of een RP-SMA-connector zijn. Controleer vóór aankoop of de connectoren op de antennes, zender en ontvanger compatibel zijn.
Brillen en monitoren

Hoe duurder de monitor of bril, hoe hoger de kwaliteit van het beeld dat ze bieden. Een eenvoudige FPV-monitor met een kleine diagonale, verblindende en moeilijk leesbare tekst zal de controle eerder hinderen dan helpen. Hetzelfde geldt voor goedkope videobrillen met een lage frequentie en niet de hoogste kwaliteit schermen.
Om te beginnen is het eenvoudigste monitormodel voldoende, maar als vliegen je echt interesseert, raden we je aan om naar apparatuur van Fatshark te kijken.
OSD
OSD is een uiterst nuttig apparaat waarmee u technische informatie kunt verkrijgen over de staat van de quadcopter. Een klein OSD-bord (on-screen-display) maakt verbinding met sensoren (snelheid, batterijspanning, stroomverbruik, GPS, enz.) die zich op de vluchtcontroller bevinden. Het maakt ook verbinding met de zender.
De piloot ontvangt OSD-informatie rechtstreeks op het beeldscherm of op de bril. Hij kan individuele indicatoren toevoegen of verwijderen als hij deze niet nodig heeft.
Geavanceerde modellen quadcopters kunnen worden uitgerust met hun eigen OSD-kaarten (of deze functionaliteit wordt geïmplementeerd op het vluchtcontrollerbord).
Over voeding
Om FPV-apparatuur te laten functioneren, moet deze op een stroombron worden aangesloten. Moderne kits vereisen 12V-spanning. Als er dus een 3S-batterij (11,1 V) aan boord van de helikopter is geïnstalleerd, kan de videocamera met de zender er ook van worden gevoed.
Spanningsregelaars
In gevallen waarin de helikopter is uitgerust met een batterij van 4S (16,4V) of groter, kunt u een spanningsregelaar gebruiken. Mocht er geen regelaar aanwezig zijn, of wil je geen verbinding maken met de accu van de drone, dan wordt er een aparte 3S accu geplaatst.
Vermogensfilter
Wanneer ze zijn aangesloten op het voedingssysteem van het vliegtuig, kan de werking van de camera en zender worden beïnvloed door interferentie van de motoren. Als gevolg hiervan zal het beeld op het scherm vol zijn met witte strepen. Om interferentie tegen te gaan wordt gebruik gemaakt van een powerfilter.
FAQ

Aan het einde van ons overzichtsartikel over het organiseren van FPV op quadcopters zullen we een aantal veelgestelde vragen beantwoorden.
Waar kan ik de apparatuur het beste plaatsen?
Als uw quadcopter al een videocamera heeft en u deze wilt gebruiken om vluchten op te nemen, kunt u een kleine FPV-camera rechtstreeks op de behuizing bevestigen.
Wat de zenderantenne betreft, deze moet zo ver mogelijk van de helikopterantennes worden geplaatst, zodat ze geen extra interferentie met elkaar veroorzaken.
Wat is "gelei"?
Het gelei-effect wordt veroorzaakt door de trillingen van het quadcopterlichaam veroorzaakt door de werking van de propellers en motoren. Het beeld lijkt een beetje te trillen of te zweven. Bij het uitzenden van video vanaf een camera is het effect mogelijk niet merkbaar. Maar bij het bekijken van een opgenomen video manifesteert deze zich volledig (als er geen gyro-gestabiliseerde cardanische ophanging is).
Wat te doen met de audio-uitvoer?
De audio-uitgang wordt meestal niet gebruikt, dus u kunt deze gerust vergeten.
Conversie van videofrequenties
Frequentieconversie kan nodig zijn als de in een bril of monitor ingebouwde ontvanger slechts op een frequentie van 5,8 GHz kan werken, terwijl je op een frequentie van bijvoorbeeld 1,2 GHz wilt werken. In dit geval zal een speciale conversiemodule nuttig zijn.
Is het mogelijk om video op een smartphone weer te geven?
Veel actiecamera's die zijn uitgerust met een Wi-Fi-module kunnen video uitzenden naar een smartphone of tablet. Het probleem is dat het communicatiebereik via een Wi-Fi-verbinding zeer beperkt is en niet groter is dan 50-100 meter, afhankelijk van de omstandigheden.
Je kunt het bereikprobleem oplossen met een analoog-digitaalomzetter, maar dit heeft niet zoveel zin, omdat er een merkbare vertraging optreedt. Gedurende de tijd die nodig is om het analoge signaal om te zetten naar digitaal, heeft de helikopter de tijd om op een andere plek terecht te komen.
Hoe leer je vliegen?
Eerst moet u het onder de knie krijgen, wennen aan de afstandsbediening, verschillende vliegmodi en verschillende kostenniveaus uitproberen. De eerste vluchten van de drone moeten worden uitgevoerd op korte afstand van het bedieningspaneel, met lage snelheid, in open gebieden zonder natuurlijke of kunstmatige obstakels. Computersimulators kunnen u helpen aan de besturing te wennen, hoewel de meeste piloten de voorkeur geven aan praktijkervaring.
Conclusie
We probeerden in detail de kenmerken van het kiezen van FPV-apparatuur te overwegen, spraken over de belangrijkste parameters en kenmerken en gaven voorbeelden van kant-en-klare modellen van FPV-quadcopters.
Bediening met behulp van first-person video verschilt aanzienlijk van de bediening die de meeste piloten gewend zijn met alleen een afstandsbediening. Het maakt het mogelijk om langeafstandsvluchten te maken zonder bang te hoeven zijn dat de helikopter tegen een plotseling obstakel botst. Bij het gebruik van hoogwaardige componenten (voornamelijk een bril en een camera) krijgt de piloot een heel andere ervaring. In deze augmented reality geeft hij niet langer alleen commando's, maar lijkt hij zelf aanwezig te zijn aan boord van het vliegtuig.
Dit concludeert het artikel over FPV op quadcopters. Abonneer u op onze nieuwe recensies, deel nuttig materiaal op sociale netwerken en tot ziens.
Als je al heel lang met vliegtuigmodellen te maken hebt, serieus geïnteresseerd bent in draaivleugeltechnologie, modelleringstrends volgt, zul je zeker achtervolgd worden door de wens om je model te verbeteren, en daarmee de vraag: “Hoe kies je een afstandsbediening voor een radiografisch bestuurbare helikopter?”
Goedkope afstandsbediening voor een helikopter - geld in de afvoer
De meest betaalbare optie voor een afstandsbediening voor een radiografisch bestuurbare helikopter is 2- en 3-kanaals. Maar het is de moeite waard om te overwegen dat het nadeel van dergelijke besparingen een beperkte functionaliteit zal zijn. Dit is de eenvoudigste, meest primitieve zender, en de mogelijkheden ervan zijn nauwelijks voldoende voor een normale vlucht. Je zult je snel vervelen met dit model en je zult niet het verwachte plezier brengen. Een volwaardige 3-kanaals afstandsbediening is geschikt voor “indoor” helikopters en kinderspeelgoed. Modellen met deze besturing kunnen op en neer vliegen, vooruit en achteruit vliegen en bochten maken.
De beste optie voor vliegtuigmodelbouwers die helikopters gebruiken voor hobby en entertainment zijn afstandsbedieningen met 4 kanalen. Naast de hierboven genoemde functies voegen ze zijwaartse beweging (rollen) toe. De apparatuur kan zowel het tegen geluid beschermde 2,4 GHz-bereik als het megahertz-kanaal gebruiken.
Zijwaartse vluchten worden uitgevoerd met behulp van een tuimelschijf - dit is een speciaal mechanisme dat zich nabij de basis van de bladen bevindt en dat, op het juiste commando, de rotor in de ene of de andere richting kantelt en het vliegtuig rolt.
Voor echte azen, kenners van professionele apparatuur en grote kunstvliegmachines is de meest “geavanceerde”, multifunctionele en betrouwbare apparatuur nodig.
Een afstandsbediening voor een radiografisch bestuurbare helikopter met 5 of meer kanalen wordt een computerafstandsbediening genoemd. Het draait niet alleen om het apparaat, maar om de aanwezigheid van een speciaal liquid crystal display waarop alle belangrijke gegevens voor de vlucht worden uitgezonden. Zo'n zender kan voor meerdere modellen tegelijk worden geconfigureerd en geprogrammeerd voor de functies die u nodig heeft: het mixen (combinatie) van kanalen, exponentiële afbuiging van de stuurwielen, het beperken van de slag van de stuurwielen, etc.
Wees voorzichtig bij het kiezen van 6-kanaalsapparatuur. Het kan universeel zijn, voor alle vliegtuigmodellen: vliegtuigen, helikopters, zweefvliegtuigen, multicopters, of alleen bedoeld voor apparaten van een bepaald type.
De meest betrouwbare afstandsbedieningen voor quadcopters
 De vraag hoe je een afstandsbediening voor een quadcopter kiest, wordt op een vergelijkbare manier opgelost. Veel vliegtuigen met meerdere rotors werken, als ze niet over een eigen originele app beschikken, perfect met een afstandsbediening van een helikopter. De noodzaak om een afstandsbediening voor een quadcopter aan te schaffen, is ook een raadsel voor iedereen die besluit zelf een drone in elkaar te zetten. Daarom zullen we dieper ingaan op de criteria voor het selecteren van besturingsapparatuur voor een quadcopter.
De vraag hoe je een afstandsbediening voor een quadcopter kiest, wordt op een vergelijkbare manier opgelost. Veel vliegtuigen met meerdere rotors werken, als ze niet over een eigen originele app beschikken, perfect met een afstandsbediening van een helikopter. De noodzaak om een afstandsbediening voor een quadcopter aan te schaffen, is ook een raadsel voor iedereen die besluit zelf een drone in elkaar te zetten. Daarom zullen we dieper ingaan op de criteria voor het selecteren van besturingsapparatuur voor een quadcopter.
Het eerste waar u rekening mee moet houden, is de locatie van de bedieningselementen (knoppen, sticks, knoppen) op het bedieningspaneel. Mode2-type zenders worden als het handigst beschouwd, wanneer de joystick die verantwoordelijk is voor gas en bochten zich onder de linkerhand bevindt en het kantelen met de rechterhand wordt uitgevoerd. Alle hendels, behalve het gaspedaal, hebben een veer om terug te keren naar de neutrale stand.
Voor normale quadcoptervluchten zijn 4 kanalen ook voldoende (gas, gieren, pitchen, rollen), maar als je aanvullende handelingen wilt gebruiken: camera-cardanische bediening, automatische GPS-vlucht, vracht vastleggen en transporteren, heb je een afstandsbediening nodig met een groter aantal kanalen.
Hoe dan ook een universeel antwoord op de vraag “Welke afstandsbediening voor een quadcopter moet ik kopen?” - hoe meer kanalen, hoe beter. Neem het in reserve, en als je de functionaliteit van je quad vergroot, zul je zeker geen problemen ondervinden.
Een andere indicator die uw aandacht verdient, is de signaaloverdrachtstandaard. Meestal zijn er zenders te vinden die werken in de 27 MHz-, 40 MHz- en 2,4 GHz-banden. Een klein aandeel wordt toegewezen aan modellen met een infraroodsignaal.
Als je voor serieuze doeleinden een afstandsbediening kiest, moet je kijken naar 2,4 GHz-zenders. Ze onderscheiden zich door een goed bereik, een laag ruisbereik en weerstand tegen interferentie. De andere opties zijn niet zo lang bereik en betrouwbaar.
Een ander type communicatie dat actief wordt gebruikt bij quadcopters is de Wi-Fi-verbinding. Het besturen van een drone met behulp van een smartphone of tablet is erg handig: je hoeft niet te wennen aan de interface, je kunt video op het scherm bekijken, je hoeft geen extra monitor te kopen en deze mee te nemen naar de vluchtlocatie. U kunt bewegingen, snelheid en hoogte regelen, foto's maken en video's opnemen met slechts één aanraking van uw vinger. Degenen die bekend zijn met verschillende multimediagadgets zullen dit type afstandsbediening voor een quadcopter leuk vinden.
Het grootste nadeel van Wi-Fi-datatransmissie is het korte bereik. Maar als je mobiele apparaten gebruikt als aanvulling op professionele apparatuur, rechtvaardigt dat zichzelf.
Als je van plan bent om niet alleen voor de lol met een quadcopter te vliegen, maar ook om foto's en videomateriaal van hoge kwaliteit te krijgen, dan is het antwoord op de vraag "Welke afstandsbediening voor een quadcopter moet ik kopen" "Alleen met FailSafe!"
Als de communicatie tussen zender en ontvanger (dat wil zeggen tussen het model en de piloot) verloren gaat, instrueert de FailSafe-modus de controller automatisch om de quadcopter terug te brengen naar het startpunt. Een hele handige optie als je in een stad vliegt waar de radio-uitzending erg luidruchtig is, of als je nog niet voldoende vaardigheden hebt in het omgaan met een drone.
Een andere modus werkt iets anders: Hold. Als het signaal verloren gaat, zal het systeem het laatste signaal opnieuw dupliceren, wat zal worden uitgevoerd totdat de piloot de besturing weer kan overnemen. De Hold-modus beschermt uw model tegen ongelukken en vallen, dus de aanwezigheid ervan is verplicht voor dure apparaten!
Laten we alles samenvatten waar we het hierboven over hadden:
- Voor hobbyhelikopters en multicopters heb je een bedieningspaneel met 4 - 6 kanalen nodig;
- Voor professionele apparaten is het de moeite waard om apparatuur van 5 kanalen en hoger te kopen;
- De 2,4 GHz afstandsbediening is niet bang voor interferentie;
- Je kunt alleen over korte afstanden via wifi vliegen;
- Professionele quadcopters hebben absoluut de FailSafe- en Hold-modi nodig.
Nu weet u hoe u niet in de war kunt raken in het assortiment afstandsbedieningen, en kunt u zelfstandig de apparatuur kiezen voor een radiografisch bestuurbaar vliegtuigbedieningspaneel, enz. De specialisten van de Planeta Hobby winkel staan altijd klaar om je te helpen en de beste opties uit het assortiment aan te bevelen.