
Un système d'équations algébriques linéaires est donné. Système d'équations
L'équation a une solution : si au moins un des coefficients des inconnues est non nul. Dans ce cas, tout vecteur de dimension est appelé solution de l'équation si, après avoir substitué ses coordonnées, l'équation se transforme en une identité.
Caractéristiques générales du système d'équations résolu
Exemple 20.1Décrire le système d'équations.
![]()
Solution:
1. Y a-t-il une équation contradictoire dans la composition?(Si les coefficients, dans ce cas l'équation a la forme : et s'appelle contradictoire.)
- Si le système contient un contradictoire, alors un tel système est incompatible et n'a pas de solution
2. Rechercher toutes les variables autorisées. (L'inconnu s'appellepermis pour un système d'équations s'il entre dans l'une des équations du système avec un coefficient de +1, et n'entre pas dans les autres équations (c'est-à-dire qu'il entre avec un coefficient égal à zéro).
3. Le système d'équations est-il autorisé ? (Le système d'équations est appelé permis si chaque équation du système contient une inconnue résolue, parmi laquelle il n'y en a pas qui coïncident)
Dans le cas général, le système d'équations résolu a la forme :Les inconnues admises, prises une à une dans chaque équation du système, forment ensemble complet d'inconnues résolues systèmes. (dans notre exemple c'est le cas)
Les inconnues résolues incluses dans l'ensemble complet sont également appelées de base(), et non inclus dans l'ensemble - libre ().

A ce stade, l'essentiel est de comprendre ce qui est résolu inconnu(inclus dans la base et gratuit).
Solution de base partielle générale
Par décision générale Un système d'équations autorisé est un ensemble d'expressions pour les inconnues résolues en termes de termes libres et d'inconnues libres :

Par décision privée est appelée la solution obtenue à partir du général pour des valeurs spécifiques de variables libres et inconnues.
Solution basique s'appelle une solution particulière obtenue à partir de la solution générale aux valeurs nulles des variables libres.
- La solution de base (vecteur) est appelée dégénérer si le nombre de ses coordonnées non nulles est inférieur au nombre d'inconnues autorisées.
- La solution de base s'appelle non dégénéré si le nombre de ses coordonnées non nulles est égal au nombre d'inconnues autorisées du système inclus dans l'ensemble complet.
Exemple 1. Trouvez la solution générale, de base et toute solution particulière du système d'équations :Théorème (1)
Le système d'équations autorisé est toujours cohérent(car il a au moins une solution) ; et si le système n'a pas d'inconnues libres,(c'est-à-dire que dans le système d'équations, toutes celles autorisées sont incluses dans la base) alors il est défini(n'a qu'une seule solution) ; s'il y a au moins une variable libre, alors le système est indéfini(a un nombre infini de solutions).
![]()
Solution:
1. Vérifier si le système est légal ?
- Le système est résolu (puisque chacune des équations contient une inconnue résolue)
2. Nous incluons dans l'ensemble les inconnues résolues - une de chaque équation.
3. Nous écrivons la solution générale en fonction des inconnues résolues que nous avons incluses dans l'ensemble.

4. On trouve une solution particulière... Pour ce faire, nous assimilons les variables libres que nous n'avons pas incluses dans l'ensemble à des nombres arbitraires.
![]()
Réponse: solution privée(une des options)
5. Trouver la solution de base... Pour ce faire, nous assimilons à zéro les variables libres que nous n'avons pas incluses dans l'ensemble.
Transformations élémentaires d'équations linéaires
Les systèmes d'équations linéaires sont réduits à des systèmes autorisés équivalents en utilisant des transformations élémentaires.
Théorème (2)
Si seulement multiplier l'équation du système par un nombre non nul, et laissez le reste des équations inchangé, alors. (c'est-à-dire que si vous multipliez les côtés gauche et droit de l'équation par le même nombre, vous obtenez une équation équivalente à celle-ci)
Théorème (3)
Si à une équation du système en ajouter une autre, et laisser toutes les autres équations inchangées, alors on obtient un système équivalent au donné... (c'est-à-dire que si vous ajoutez deux équations (en ajoutant leurs côtés gauche et droit), vous obtenez une équation équivalente aux données)
Corollaire des théorèmes (2 et 3)
Si à une équation, ajoutez-en une autre, multipliée par un certain nombre, et laisser toutes les autres équations inchangées, alors nous obtenons un système équivalent au donné.
Formules de conversion des coefficients du système
Si nous avons un système d'équations et que nous voulons le transformer en un système d'équations résolu, la méthode de Jordan-Gauss va nous aider.
Jordan transformer avec un élément de résolution vous permet d'obtenir l'inconnue résolue dans l'équation avec un nombre pour le système d'équations. (exemple 2).
La transformée de Jordan consiste en deux types de transformations élémentaires :Disons que nous voulons faire de l'inconnue de l'équation inférieure l'inconnue résolue. Pour ce faire, nous devons diviser par, de sorte que le montant.
Exemple 2 Recalculons les coefficients du système
Lors de la division d'une équation avec un nombre par, ses coefficients sont recalculés selon les formules :
![]()
Pour éliminer d'une équation avec un nombre, vous devez multiplier l'équation avec un nombre par et ajouter à cette équation.
Théorème (4) Sur la réduction du nombre d'équations dans le système.
Si le système d'équations contient une équation triviale, alors elle peut être exclue du système et le système résultant est équivalent à celui d'origine.
Théorème (5) Sur l'incompatibilité d'un système d'équations.
Si un système d'équations contient une équation contradictoire, alors il est incohérent.
Algorithme de la méthode Jordan-Gauss
L'algorithme de résolution de systèmes d'équations par la méthode de Jordan-Gauss consiste en un certain nombre d'étapes du même type, à chacune desquelles les actions sont effectuées dans l'ordre suivant :
- Vérifie si le système est incohérent. Si le système contient une équation contradictoire, alors il est incohérent.
- La possibilité de réduire le nombre d'équations est vérifiée. Si le système contient une équation triviale, elle est supprimée.
- Si le système d'équations est résolu, alors la solution générale du système est écrite et, si nécessaire, des solutions particulières.
- Si le système n'est pas résolu, alors dans l'équation qui ne contient pas l'inconnue résolue, un élément de résolution est sélectionné et la transformée de Jordan est effectuée avec cet élément.
- Revenez ensuite au point 1.
Trouve: deux solutions générales et deux solutions de base correspondantes

Solution:
Les calculs sont indiqués dans le tableau suivant :
Les actions sur les équations sont indiquées à droite du tableau. Les flèches indiquent à quelle équation l'équation avec l'élément de résolution est ajoutée, multipliée par un facteur approprié.

Les trois premières lignes du tableau contiennent les coefficients pour les inconnues et les membres de droite du système d'origine. Les résultats de la première transformée de Jordan avec l'élément de résolution égal à un sont indiqués aux lignes 4, 5, 6. Les résultats de la deuxième transformée de Jordan avec l'élément de résolution égal à (-1) sont donnés aux lignes 7, 8, 9 Puisque la troisième équation est triviale, elle peut être considérée.
Votre vie privée est importante pour nous. Pour cette raison, nous avons développé une politique de confidentialité qui décrit comment nous utilisons et stockons vos informations. Veuillez lire notre politique de confidentialité et laissez-nous savoir si vous avez des questions.
Collecte et utilisation des informations personnelles
Les informations personnelles font référence aux données qui peuvent être utilisées pour identifier une personne spécifique ou la contacter.
Vous pouvez être invité à fournir vos informations personnelles à tout moment lorsque vous nous contactez.
Vous trouverez ci-dessous quelques exemples des types d'informations personnelles que nous pouvons collecter et de la manière dont nous pouvons utiliser ces informations.
Quelles informations personnelles nous collectons :
- Lorsque vous laissez une demande sur le site, nous pouvons collecter diverses informations, notamment votre nom, numéro de téléphone, adresse e-mail, etc.
Comment utilisons-nous vos informations personnelles:
- Les informations personnelles que nous collectons nous permettent de vous contacter et de signaler des offres uniques, des promotions et d'autres événements et événements à venir.
- De temps à autre, nous pouvons utiliser vos informations personnelles pour envoyer des notifications et des messages importants.
- Nous pouvons également utiliser des informations personnelles à des fins internes, telles que la réalisation d'audits, l'analyse de données et diverses recherches afin d'améliorer les services que nous fournissons et de vous fournir des recommandations concernant nos services.
- Si vous participez à un tirage au sort, à un concours ou à un événement promotionnel similaire, nous pouvons utiliser les informations que vous fournissez pour administrer ces programmes.
Divulgation d'informations à des tiers
Nous ne divulguons pas les informations reçues de votre part à des tiers.
Exceptions:
- S'il est nécessaire - conformément à la loi, à une ordonnance du tribunal, dans le cadre d'une procédure judiciaire et/ou sur la base de demandes publiques ou des demandes des autorités gouvernementales sur le territoire de la Fédération de Russie - de divulguer vos informations personnelles. Nous pouvons également divulguer des informations vous concernant si nous déterminons qu'une telle divulgation est nécessaire ou appropriée pour la sécurité, l'application de la loi ou d'autres raisons socialement importantes.
- En cas de réorganisation, de fusion ou de vente, nous pouvons transférer les informations personnelles que nous collectons au tiers approprié - le successeur légal.
Protection des renseignements personnels
Nous prenons des précautions - y compris administratives, techniques et physiques - pour protéger vos informations personnelles contre la perte, le vol et l'abus, ainsi que contre l'accès, la divulgation, l'altération et la destruction non autorisés.
Respect de votre vie privée au niveau de l'entreprise
Afin d'assurer la sécurité de vos informations personnelles, nous apportons les règles de confidentialité et de sécurité à nos employés, et surveillons strictement la mise en œuvre des mesures de confidentialité.
- Systèmes méquations linéaires avec m inconnu.
Résoudre un système d'équations linéaires Est-ce qu'un tel ensemble de nombres ( x 1, x 2, ..., x n), lorsqu'il est substitué dans chacune des équations du système, l'égalité correcte est obtenue.
où a ij, i = 1, ..., m; j = 1,…, n- les coefficients du système ;
b je, je = 1, ..., m- membres gratuits;
x j, j = 1, ..., n- inconnu.
Le système ci-dessus peut être écrit sous forme matricielle : A X = B,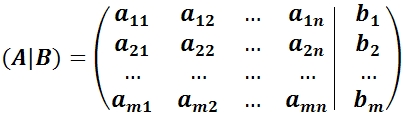

où ( UNE|B) est la matrice principale du système ;
UNE- matrice système étendue ;
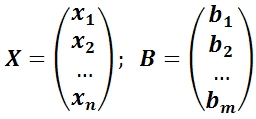
X- colonne d'inconnues ;
B- colonne de membres libres.
Si la matrice B n'est pas une matrice nulle ∅, alors ce système d'équations linéaires est dit inhomogène.
Si la matrice B= ∅, alors ce système d'équations linéaires est dit homogène. Un système homogène a toujours une solution nulle (triviale) : x 1 = x 2 =…, x n = 0.
Système conjoint d'équations linéaires Est un système d'équations linéaires qui a une solution.
Système incohérent d'équations linéaires Est un système d'équations linéaires qui n'a pas de solution.
Un système défini d'équations linéaires Est un système d'équations linéaires qui a une solution unique.
Système indéfini d'équations linéaires Est un système d'équations linéaires qui a un ensemble infini de solutions. - Systèmes de n équations linéaires à n inconnues
Si le nombre d'inconnues est égal au nombre d'équations, alors la matrice est carrée. Le déterminant d'une matrice est appelé déterminant principal d'un système d'équations linéaires et est désigné par le symbole Δ.
La méthode de Cramer pour résoudre des systèmes méquations linéaires avec m inconnu.
La règle de Cramer.
Si le déterminant principal d'un système d'équations linéaires n'est pas égal à zéro, alors le système est cohérent et défini, et la seule solution est calculée par les formules de Cramer :
où Δ i - déterminants obtenus à partir du déterminant principal du système Δ en remplaçant jeème colonne par colonne membre gratuite. ... - Systèmes de m équations linéaires à n inconnues
Théorème de Kronecker-Capelli.
Pour qu'un système d'équations linéaires donné soit cohérent, il est nécessaire et suffisant que le rang de la matrice du système soit égal au rang de la matrice étendue du système, sonné (Α) = sonné (Α | B).
Si sonna (Α) ≠ sonna (Α | B), alors le système n'a certainement pas de solutions.
Si sonné (Α) = sonné (Α | B), alors deux cas sont possibles :
1) sonné (Α) = n(au nombre d'inconnues) - la solution est unique et peut être obtenue par les formules de Cramer ;
2) a sonné (Α)< n - il existe une infinité de solutions. - Méthode de Gauss pour résoudre des systèmes d'équations linéaires
Composons une matrice développée ( UNE|B) d'un système donné de coefficients aux membres inconnus et de droite.
La méthode de Gauss ou méthode d'élimination des inconnues consiste à réduire la matrice étendue ( UNE|B) à l'aide de transformations élémentaires sur ses lignes vers la forme diagonale (vers la forme triangulaire supérieure). Pour en revenir au système d'équations, toutes les inconnues sont déterminées.
Les transformations élémentaires sur les chaînes incluent les éléments suivants :
1) échanger deux lignes ;
2) multiplier une chaîne par un nombre autre que 0 ;
3) ajouter à la chaîne une autre chaîne multipliée par un nombre arbitraire ;
4) jeter la chaîne nulle.
La matrice étendue, réduite à une forme diagonale, correspond à un système linéaire équivalent à celui donné, dont la solution ne pose pas de difficultés. ... - Système d'équations linéaires homogènes.
Un système homogène ressemble à :
il correspond à l'équation matricielle Un X = 0.
1) Un système homogène est toujours compatible, puisque r (A) = r (A | B), il y a toujours une solution nulle (0, 0,…, 0).
2) Pour qu'un système homogène ait une solution non nulle, il est nécessaire et suffisant que r = r (A)< n , ce qui équivaut à = 0.
3) Si r< n , alors délibérément Δ = 0, alors des inconnues libres apparaissent c 1, c 2, ..., c n-r, le système a des solutions non triviales, et il y en a une infinité.
4) Solution générale Xà r< n peut s'écrire sous forme matricielle comme suit :
X = c 1 X 1 + c 2 X 2 +… + c n-r X n-r,
où sont les solutions X 1, X 2, ..., X n-r forment un système fondamental de décisions.
5) Le système fondamental de solutions peut être obtenu à partir de la solution générale d'un système homogène : ,
,
si les valeurs des paramètres sont successivement supposées être (1, 0,…, 0), (0, 1,…, 0),…, (0, 0,…, 1).
Décomposition de la solution générale en termes du système fondamental de solutions Est un enregistrement d'une solution générale sous la forme d'une combinaison linéaire de solutions appartenant au système fondamental.
Théorème... Pour qu'un système d'équations linéaires homogènes ait une solution non nulle, il est nécessaire et suffisant que Δ ≠ 0.
Donc, si le déterminant Δ 0, alors le système a une solution unique.
Si Δ ≠ 0, alors le système d'équations linéaires homogènes a un ensemble infini de solutions.
Théorème... Pour qu'un système homogène ait une solution non nulle, il est nécessaire et suffisant que r (A)< n .
Preuve:
1) r ne peut pas être plus m(le rang de la matrice ne dépasse pas le nombre de colonnes ou de lignes) ;
2) r< n puisque si r = n, alors le déterminant principal du système est Δ ≠ 0, et, d'après les formules de Cramer, il existe une unique solution triviale x 1 = x 2 =… = x n = 0, ce qui contredit la condition. Moyens, r (A)< n .
Conséquence... Pour un système homogène méquations linéaires avec m inconnues a une solution non nulle, il est nécessaire et suffisant que = 0.
Solution... A =  ... Trouvez r (A). Parce que matrice Et a un ordre de 3x4, alors l'ordre le plus élevé des mineurs est 3. Dans ce cas, tous les mineurs du troisième ordre sont égaux à zéro (vérifiez-le vous-même). Moyens, r (A)< 3. Возьмем главный base mineure = -5-4 = -9 ≠
0. D'où r (A) = 2.
... Trouvez r (A). Parce que matrice Et a un ordre de 3x4, alors l'ordre le plus élevé des mineurs est 3. Dans ce cas, tous les mineurs du troisième ordre sont égaux à zéro (vérifiez-le vous-même). Moyens, r (A)< 3. Возьмем главный base mineure = -5-4 = -9 ≠
0. D'où r (A) = 2.
Envisager matrice AVEC =  .
.
Mineur de la troisième ordre ≠ 0. Par conséquent, r (C) = 3.
Puisque r (A) ≠ r (C), alors le système est incohérent.
Exemple 2. Déterminer la cohérence du système d'équations 
Résolvez ce système s'il s'avère être commun.
Solution.
A =, C =  ... Évidemment, r (A) 3, r (C) ≤ 4. Puisque detC = 0, alors r (C)< 4. Envisager mineur troisième ordre situé dans le coin supérieur gauche de la matrice A et C : = -23 ≠
0. Par conséquent, r (A) = r (C) = 3.
... Évidemment, r (A) 3, r (C) ≤ 4. Puisque detC = 0, alors r (C)< 4. Envisager mineur troisième ordre situé dans le coin supérieur gauche de la matrice A et C : = -23 ≠
0. Par conséquent, r (A) = r (C) = 3.
Nombre inconnu dans le système n = 3... Cela signifie que le système a une solution unique. Dans ce cas, la quatrième équation représente la somme des trois premières et peut être ignorée.
D'après les formules de Cramer on obtient x 1 = -98/23, x 2 = -47/23, x 3 = -123/23.
2.4. Méthode matricielle. Méthode de Gauss
Le système méquations linéaires avec m les inconnues peuvent être résolues méthode matricielle selon la formule X = A -1 B (à Δ ≠ 0), qui est obtenu à partir de (2) en multipliant les deux parties par A -1.
Exemple 1. Résoudre le système d'équations 
méthode matricielle (dans la section 2.2 ce système a été résolu par les formules de Cramer)
Solution... = 10 ≠ 0 A = est une matrice non dégénérée.
=  (assurez-vous-en vous-même en faisant les calculs nécessaires).
(assurez-vous-en vous-même en faisant les calculs nécessaires).
A -1 = (1 / ) x =  .
.
X = A -1 B = x =.
Réponse: .
D'un point de vue pratique méthode matricielle et formules Cramer sont intensifs en calculs, donc la préférence est donnée à Méthode gaussienne, qui consiste en l'élimination successive des inconnues. Pour cela, le système d'équations est réduit à un système équivalent avec une matrice étendue triangulaire (tous les éléments en dessous de la diagonale principale sont égaux à zéro). Ces actions sont appelées mouvements directs. A partir du système triangulaire résultant, les variables sont trouvées par substitutions successives (mouvement vers l'arrière).
Exemple 2... En utilisant la méthode de Gauss, résolvez le système
(Ce système ci-dessus a été résolu par la formule de Cramer et la méthode matricielle).
Solution.
Cours direct. Nous écrivons la matrice développée et, à l'aide de transformations élémentaires, la ramenons sous une forme triangulaire :
 ~
~  ~
~  ~
~  ~
~  .
.
On a le système 
Mouvement inverse. De la dernière équation on trouve N.-É. 3 = -6 et branchez-le dans la deuxième équation :
N.-É. 2 = - 11/2 - 1/4N.-É. 3 = - 11/2 - 1/4(-6) = - 11/2 + 3/2 = -8/2 = -4.
N.-É. 1 = 2 -N.-É. 2 + N.-É. 3 = 2+4-6 = 0.
Réponse: .
2.5. Solution générale d'un système d'équations linéaires
Soit un système d'équations linéaires = b je(je=). Soit r (A) = r (C) = r, c'est-à-dire le système est partagé. Tout mineur d'ordre r différent de zéro est mineur de base. Sans perte de généralité, nous supposerons que le mineur de base est situé dans les premières r (1 ≤ r ≤ min (m, n)) lignes et colonnes de la matrice A. En écartant les dernières équations mr du système, nous écrivons le système tronqué :

qui est équivalent à celui d'origine. Appelons les inconnues x 1, ... .x r basique, et xr+1, ...,xr libre et transférer les termes contenant des inconnues libres au membre de droite des équations du système tronqué. On obtient un système par rapport aux inconnues de base :

qui pour chaque ensemble de valeurs d'inconnues libres x r +1 = 1, ..., x n = С n-r a la seule solution x 1 (С 1, ..., n-r), ..., x r (С 1, ..., n-r), trouvé par la règle de Cramer.
Solution appropriée raccourci, et, par conséquent, le système original a la forme :
X (C 1, ..., C n-r) =  -
solution générale du système.
-
solution générale du système.
Si nous attribuons des valeurs numériques aux inconnues libres dans la solution générale, alors nous obtenons une solution du système linéaire, appelée le particulier.
Exemple... Établir la compatibilité et trouver une solution générale au système

Solution... A =  , C =
, C =  .
.
Donc comment r (A)= r (C) = 2 (voir par vous-même), alors le système d'origine est compatible et a un nombre infini de solutions (puisque r< 4).
La méthode de Gauss présente un certain nombre d'inconvénients : il est impossible de savoir si le système est compatible ou non tant que toutes les transformations nécessaires dans la méthode de Gauss n'ont pas été effectuées ; La méthode gaussienne n'est pas adaptée aux systèmes avec des coefficients en lettres.
Considérez d'autres méthodes pour résoudre des systèmes d'équations linéaires. Ces méthodes utilisent le concept de rang d'une matrice et réduisent la solution de tout système joint à la solution du système auquel s'applique la règle de Cramer.
Exemple 1. Trouver la solution générale du système d'équations linéaires suivant en utilisant le système fondamental des solutions du système homogène réduit et une solution particulière du système inhomogène.
1. Composition de la matrice UNE et matrice système étendue (1)


2. Examinez le système (1) pour la compatibilité. Pour ce faire, on retrouve les rangs des matrices UNE et https://pandia.ru/text/78/176/images/image006_90.gif "width =" 17 "height =" 26 src = ">). S'il s'avère que, alors le système (1) inconsistant. Si nous obtenons cela , alors ce système est compatible et nous allons le résoudre. (L'étude de compatibilité est basée sur le théorème de Kronecker-Capelli.)
une. Nous trouvons rA.
Trouver rA, nous considérerons séquentiellement les mineurs non nuls des premier, deuxième, etc., ordres de la matrice UNE et les mineurs qui les bordent.
M1= 1 0 (1 est tiré du coin supérieur gauche de la matrice UNE).
Frontière M1 la deuxième ligne et la deuxième colonne de cette matrice.  ... Nous continuons à la frontière M1 la deuxième ligne et la troisième colonne..gif "width =" 37 "height =" 20 src = ">. Bordez maintenant un mineur différent de zéro M2 ′ deuxième ordre.
... Nous continuons à la frontière M1 la deuxième ligne et la troisième colonne..gif "width =" 37 "height =" 20 src = ">. Bordez maintenant un mineur différent de zéro M2 ′ deuxième ordre.
Nous avons:  (puisque les deux premières colonnes sont les mêmes)
(puisque les deux premières colonnes sont les mêmes)
 (puisque les deuxième et troisième lignes sont proportionnelles).
(puisque les deuxième et troisième lignes sont proportionnelles).
On voit ça rA = 2, a est le mineur de base de la matrice UNE.
b. Nous trouvons.
Basique assez mineur M2 ′ matrices UNE frontière avec une colonne de membres libres et toutes les lignes (nous n'avons que la dernière ligne).
 ... Il s'ensuit donc que М3 ′ ′ reste le mineur de base de la matrice https://pandia.ru/text/78/176/images/image019_33.gif "width =" 168 height = 75 "height =" 75 "> (2)
... Il s'ensuit donc que М3 ′ ′ reste le mineur de base de la matrice https://pandia.ru/text/78/176/images/image019_33.gif "width =" 168 height = 75 "height =" 75 "> (2)
Parce que M2 ′- base mineure de la matrice UNE systèmes (2) , alors ce système est équivalent au système (3) constitué des deux premières équations du système (2) (pour M2 ′ se trouve dans les deux premières lignes de la matrice A).
 (3)
(3)
Depuis la base mineure https://pandia.ru/text/78/176/images/image021_29.gif "width =" 153 "height =" 51 "> (4)
Dans ce système, deux inconnues libres ( x2 et x4 ). C'est pourquoi RSF systèmes (4) se compose de deux solutions. Pour les trouver, ajoutons des inconnues gratuites dans (4) les valeurs d'abord x2 = 1 , x4 = 0 , puis - x2 = 0 , x4 = 1 .
À x2 = 1 , x4 = 0 on a:
 .
.
Ce système a déjà la seule chose solution (elle peut être trouvée par la règle de Cramer ou de toute autre manière). En soustrayant la première de la deuxième équation, on obtient :
Sa solution sera x1 = -1 , x3 = 0 ... Étant donné les valeurs x2 et x4 que nous avons donné, nous obtenons la première solution fondamentale du système (2) : .
Maintenant, nous mettons (4) x2 = 0 , x4 = 1 ... On a:
 .
.
On résout ce système par le théorème de Cramer :

 .
.
On obtient la deuxième solution fondamentale du système (2) : .
Solutions 1 , 2 et maquiller RSF systèmes (2) ... Alors sa solution générale serait
γ= C1 β1 + C2 β2 = C1 (‑1, 1, 0, 0) + C2 (5, 0, 4, 1) = (- C1 + 5C2, C1, 4C2, C2)
Ici C1 , C2 - constantes arbitraires.
4. Trouvez-en un privé Solution système hétérogène(1) ... Comme au paragraphe 3 , au lieu du système (1) considérer le système équivalent (5) constitué des deux premières équations du système (1) .
 (5)
(5)
Déplacer les inconnues libres vers la droite x2 et x4.
 (6)
(6)
Donnons gratuitement des inconnus x2 et x4 valeurs arbitraires, par exemple x2 = 2 , x4 = 1 et les remplacer dans (6) ... On obtient le système

Ce système a une solution unique (puisque son déterminant М2′0). En le résolvant (par le théorème de Cramer ou par la méthode de Gauss), on obtient x1 = 3 , x3 = 3 ... Étant donné les valeurs des inconnues libres x2 et x4 , on a solution particulière d'un système hétérogène(1)1 = (3,2,3,1).
5. Maintenant, il reste à écrire solution générale du système inhomogène(1) : il est égal à la somme solution privée ce système et solution générale de son système homogène réduit (2) :
= α1 + γ = (3, 2, 3, 1) + (- C1 + 5C2, C1, 4C2, C2).
Ça signifie:  (7)
(7)
6. Examen. Pour vérifier si vous avez correctement résolu le système (1) , nous avons besoin d'une solution générale (7) remplacer dans (1) ... Si chaque équation devient l'identité ( C1 et C2 doit être détruit), alors la solution est trouvée correctement.
nous allons substituer (7) par exemple, seule la dernière équation du système (1) (X1 + X2 + X3 ‑9 X4 =‑1) .
On obtient : (3 – С1 + 5С2) + (2 + С1) + (3 + 4С2) –9 (1 + С2) = - 1
(C1 – C1) + (5C2 + 4C2–9C2) + (3 + 2 + 3–9) = - 1
D'où –1 = –1. Nous avons une identité. On fait ça avec toutes les autres équations du système (1) .
Commenter. Le contrôle est généralement assez lourd. Le "contrôle partiel" suivant peut être recommandé : dans la solution globale du système (1) attribuer des valeurs à des constantes arbitraires et remplacer la solution particulière obtenue uniquement dans les équations rejetées (c'est-à-dire dans ces équations de (1) qui ne sont pas inclus dans (5) ). Si vous obtenez des identités, alors, probablement, solution système (1) trouvé correctement (mais un tel contrôle ne donne pas une garantie complète d'exactitude !). Par exemple, si dans (7) mettre C2 =- 1 , C1 = 1, alors on obtient : x1 = -3, x2 = 3, x3 = -1, x4 = 0. En substituant à la dernière équation du système (1), on a : - 3+3 - 1 - 9∙0= - 1 , c'est-à-dire –1 = –1. Nous avons une identité.
Exemple 2. Trouver la solution générale d'un système d'équations linéaires (1) , exprimant les inconnues de base en termes de libres.
Solution. Un péché Exemple 1, composer des matrices UNE et https://pandia.ru/text/78/176/images/image010_57.gif "width =" 156 "height =" 50 "> de ces matrices. Maintenant, nous ne laissons que ces équations du système (1) , dont les coefficients sont inclus dans cette mineure de base (c'est-à-dire que nous avons les deux premières équations) et considérons un système composé d'eux qui est équivalent au système (1).
Nous transférons les inconnues libres aux membres de droite de ces équations.
Le système (9) nous résolvons par la méthode de Gauss, en considérant les membres de droite comme des termes libres.
https://pandia.ru/text/78/176/images/image035_21.gif "width =" 202 height = 106 "height =" 106 ">

Option 2.

https://pandia.ru/text/78/176/images/image039_16.gif "width =" 192 "height =" 106 src = ">

Option 4.
https://pandia.ru/text/78/176/images/image042_14.gif "largeur =" 172 "hauteur =" 80 ">
Option 5.
https://pandia.ru/text/78/176/images/image044_12.gif "width =" 179 height = 106 "height =" 106 ">
Option 6.
https://pandia.ru/text/78/176/images/image046_11.gif "largeur =" 195 "hauteur =" 106 ">