
Biz robotlarni Arduino-da yig'amiz. Arduino roboti o'z qo'llari bilan. Arduino robotini yaratish uchun tafsilotlar
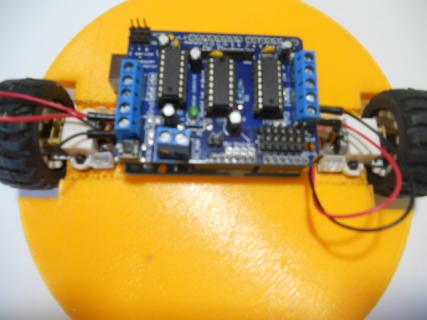
Ushbu maqolada biz robotingiz qurilishini noldan olib boramiz. Biz nimaga erishamiz, quyidagi fotosuratga qarang. Robot mustaqil ravishda va smartfonni nazorat qiladi. Va biz sizning mobil robotingizni noldan qurishga nazar tashlaymiz.
3 D. Printer
Agar men robot qurmoqchi bo'lsam, men dvigatellar, taxtalar, batareyalarni o'rnatadigan platformani tanlash bo'yicha qaror qilishim kerak. Men, albatta, tayyor variantni sotib olishim mumkin, ammo o'zingiz platformani o'zingiz qilish uchun yanada qiziqarli. Bunday platforma sizning talablaringizga albatta uchrashadi. Platforma orgidan amalga oshirilishi mumkin. Ko'zoynak, kontrplak va men uni plastikdan olib chiqaman.
Aytishingiz mumkinki, platformaning o'zi noqulay va juda ko'p vosita talab qilinadi va maydalash mashinasi bilan tugaydi. Va aytamanki, bizga tasavvur va 3D printer kerak.

3D printer? Ehtimol, hamma, ehtimol, A4-dagi matnga ehtiyojga ega bo'lgan odatiy ofis printeri bilan tanish. Shunday qilib, 3D printer - bu kerakli tafsilotlarni chop etish mumkin bo'lgan printer. Turli xil 3D printerlar mavjud. Menda FDM texnologiyasi (qatlam bilan qatlam) bilan printer bor. Boshqa qaysi texnologiyalar 3D bosib chiqarish, siz Internetda bilib olishingiz mumkin.
Arduinoda 3D printerlar ishlaydi. Agar xohlasangiz, 3D printeringizni to'plashingiz mumkin. 3D printerning asosiy g'oyasi shundaki, siz hech qanday narsani chop etishingiz mumkin, biz ishni robot uchun chop etamiz.
Avvaliga, biz platformaning tavsifi bilan aniqlaymiz. Menga ikki g'ildirakli va arduino, oziq-ovqat, motorlar va bir nechta sensorlar joylashtirilishi kerak.
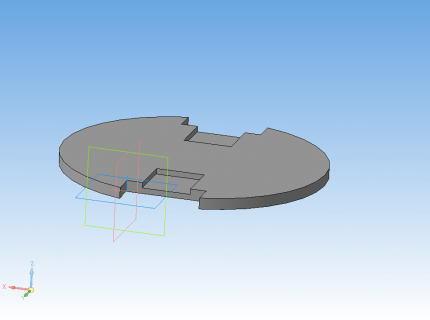
Endi siz qog'ozdagi platformaning tartibini chizishingiz va kerakli komponentlarni joylashtirishingiz kerak. Masalan, shunga o'xshash.

Ushbu tartib tayyor bo'lganda, 3D platforma modelini tuzishingiz kerak bo'ladi. Buning uchun ko'plab dasturlar mavjud. Men odatda foydalanaman. Men kompas bilan ishlay olmayman, lekin agar qiziqsangiz, siz Internetga qarashingiz yoki sharhlardagi kompas-darmonni so'rashingiz mumkin.
Mana men bilan bunday platforma.
Shundan so'ng, siz 3D modelini G-kodga, aniq 3D printerni aylantirishingiz kerak. Buning uchun maxsus dasturlar mavjud - slayderlar. Men repetyer-xost dasturidan SLAB3ER QAYERI bilan foydalanaman. Bu buyum chop etishga tayyor bo'lgan narsa shundaki.

Ammo bosma model.

Yaqinda bizda fikr bor edi va tugagan narsa bizdan oldin edi. 3D printer yordamida siz yakka tartibda noyob narsalarni yaratishingiz mumkin. 3D printer - salqin narsa. Men hammaga maslahat beraman!
Motors
Endi bizning mobil robotimiz qanday o'tishi haqida o'ylashingiz kerak. Birinchi narsa aqlga keladi, g'ildiraklar. Shunday qilib, buni qiling.
Agar kimdir eslaydi, biz dvigatelni Arduinoga ulashga harakat qildik. Esda tutmaydi, o'qimaydi yoki o'qimaydi - biz qaraymiz. Mosfet bilan motorni ulashda sezilarli kamchiliklar mavjud - aylanish tezligini va yo'nalishini tezda o'zgartirish mumkin emas. Motorsni chinakam boshqarish uchun Arduino dars berish vaqti keldi!
Buning uchun siz L293D chipidan foydalanishingiz mumkin. L293D sizga ikkita motor bilan ishlash va 1000 mln. Tanallarni birlashtirishga imkon beradi va agar siz kanallarni birlashtirishga imkon beradi va agar siz kanallarni birlashtirishga imkon beradi, keyin 1200 mln. Uyushma haqida quyida keltiriladi.
Avvaliga, har doimgidek, siz stateantni qaerdan va ulanishni aniqlash uchun qarashingiz kerak. Agar siz chiplar haqida bilmasangiz, unda siz maqolani o'qishingiz kerak.
Keling, davom etaylik. Biz bitta dvigatel bilan oddiy sxemani yig'amiz va ularga buyurilgan. Assambleya sxemasiga e'tibor.

Agar siz ingliz tilini bilmasangiz yoki shunchaki ma'lumot jadvalida aniqlamasangiz, unda ulanish tavsifi. Chip raqamlashi, barchaga hamma biladigan hamma narsani biladi yoki o'rganadi.
- 1-pin motorning aylanish tezligi uchun javobgardir. Xuddi shu kabi - PWM-dan foydalanib bo'lmaydigan darajada tashkil etilishi mumkin bo'lgan 0 dan 255 gacha bo'lgan qiymatlarni 0 dan 255 gacha bo'lgan qiymatlarni o'z ichiga oladi.
- 2 va 7-moddalar harakat yo'nalishi uchun javobgardir. Shunga o'xshash - 10 va 15-sonli imo-ishora bilan. Mantiqiy bo'linmani ushbu pinlarni bir yo'nalishda aylantirishi mumkin (motorning ulanishiga bog'liq), mantiqiy birlikni boshqasiga boqadi - motorni aylantiradi qarama-qarshi yo'nalishi.
- 3 va 6 pinlar - siz motorni ularga ulashingiz kerak. Sockillik muhim emas, aylanish yo'nalishi ulanishga bog'liq bo'ladi. Shunga o'xshash - 11 va 14-sonli pinlarda.
- 4 va 5-sonli erlar. Menimcha, bunga tushuntirish kerak emas. Shunga o'xshash - 12 va 13.
- Motors uchun 8 ta ovqatlaning. Bu 4,5 dan 36 volt oralig'ida quvvatlanishi kerak
- PIN-kod - Arduinoda mantiqiy birlik xizmat ko'rsatildi. 5 volt, agar shunday bo'lsa.
Zo'r! Motor ulangan. Endi siz borishingiz mumkin.
#Defin Frw_but 7 // Oldinga #Defin tugmasi BCW_BUT tugmasi 6 // tugmachalar "Orpine Frw 4 //" Frw 4 // "Frw 4 //... BcW 3 ni aniqlang // ... aylanishi (orqa) #defin SPD_POT A5 Int Xseid \u003d 0; // int Frw_Move \u003d 0 ning aylanish tezligini aniqlash uchun o'zgaruvchini; // "oldinga" buyruq uchun o'zgaruvchan int Bcw_Move \u003d 0; // "orqa buyruq" bo'shligini aniqlash (// PINMode PIN-kodini ko'rsatamiz; PINMOD (SPD_POT, Kirish_pullup); pinmosod (Bcw_but, input_pullup) xoletsenometr // o'qishni o'qing - 0 dan 255 // gacha - biz xspeed \u003d pinlash uchun ANGROGROD (SPD_POT) (X) xaritasi (xspeed, 0, 1023, 0, 0, 255) (Frw_Move \u003d 1;) pressni aniqlang ( Frw_Move \u003d 0;) (! Digitalread (BCW_MUE \u003d 1;), (BCW_Move \u003d 0; 0;) ni aniqlang (bcw_move \u003d 0;) Bo'sh motor () (// l293d analog raqamiga ma'lumotlarni yuboring; digitalwrite (Frw, Frw_moge); Digitalwrite (BCW, BCW_Mawe););)
Bu qanday ishlaydi? Bu oddiy ishlaydi. Chap tugmachasini bosganingizda, g'ildirak bir yo'nalishda aylanib, o'ng tomonga bosilganda - boshqasiga bosilganda. Potenttiometr dastagini burab, siz motorning aylanish tezligini o'zgartirishingiz mumkin. Videoda motorlar sinovini sinab ko'rish harakati ko'rsatilgan.
Zy Ha, bilaman, video sifati super emas, lekin men normal kamerani topishga harakat qilaman va imkon qadar tezroq otish uchun joyni tashkil qilaman.
Endi L293 kanallarining ulanishlari haqida. Agar siz ko'proq kuchli motorni ulamoqchi bo'lsangiz, siz kanallarni birlashtirishingiz mumkin.
Birinchi usul - bu chipning o'xshash xulosalarini birlashtirish uchun parallel ravishda ikki baravar ko'payadi. Minus - faqat bitta dvigatel bitta chipga ulanishi mumkin.
Ikkinchi usul yuqorida yuqoridan yuqoridan, L293-ni yana bir l293 hujumiga uchratadi. Biz 1-chi, 2-chi miltillab, 2-chi va boshqalarga hujum qilamiz. Ushbu usul shuningdek joriy kuchning kuchini oshiradi, ammo avvalgidan farqli o'laroq, ikki motor bilan bir marta boshqarishga qodir. Sizda g'oya bo'lishi mumkin - va men hali ham ikki l293-ga hujum qilyapmanmi? Afsuski, keyingi chip yana 600 mln. Daromad ahamiyatsiz bo'ladi.
"EH, siz mening 12 voltli dvigatelimni tozalashingiz kerak ..." Xafa bo'lishga shoshilmang. Kuchli motorlar uchun L293 akasi - L298, lekin endi biz buni hisobga olmaymiz. Buni biroz keyinroq qilamiz.
Motor Qalqon
Bu juda ko'p simlar bilan unchalik ahamiyatsiz ekanligiga rozi bo'ling. Sizdan qutulish uchun siz L293-dan Narxni l293-dan l293-da muzlatishingiz mumkin, lekin siz lehim qilishni xohlamagan bo'lsangiz yoki qilmasangiz, nima qilishim kerak? Buning uchun, masalan, Arduino uchun Shilkov shaklida tayyor echimlar mavjud. Men ulardan biri haqida gapirib beraman - DK Electronics-dan V1 dvigateli v1.
Bu erda fotot shifomi.

Ushbu qalqonda ikkita l293d o'rnatilgan, bu sizga birdan to'rt dvigatel bilan boshqarishga imkon beradi. Shuningdek, servomotorlar uchun ikkita aloqa mavjud. Quvvat terminalga yoki arduino kuchlari bilan o'rnatilgan jumper o'rnatiladi. Jumper, shuningdek, Shildadan Arduino uchun hokimiyat olishga imkon beradi. Ushbu qalqon bilan ishlash uchun maxsus kutubxona mavjud. Siz uni yuklab olishingiz mumkin.
Minus to'lovlari bilan. Deyarli barcha raqamli pinlar, 0, 1, 2, 13 dan tashqari, 0 va 1-sonli pinlar "Arduino" ga qarshi vositalardan foydalanib, ulardan foydalanmaslik yaxshiroqdir.
Bu erda yaxshi tomon bor. Agar siz Servoni ulamagan bo'lsangiz, masalan, 9 va 10-sonli pumlar chiqariladi va agar siz hech qanday dvigatellardan foydalanmasangiz, foydalanilmayotgan motorga qarab 3, 5, 6, 11-da, keyinchalik ular 3, 5, 6, 11-ipholllar chiqariladi. Va bundan keyin. Biz kerak bo'lganda, oltita analog mahsulotlar mavjud bo'lib, agar kerak bo'lsa, raqamli sifatida ishlatilishi mumkin.
Motors bog'lana boshlaylik. Eksperiment uchun biz oldinga, orqaga suradigan va shuningdek o'z o'qi atrofida aylanish uchun robot qilamiz. Platforma sifatida men yuqorida tavsiflangan o'z taraqqiyotimni olib bordim. Siz ruhni mamnun qilishingiz mumkin, asosiy narsa xususiyatlarga muvofiq mos keladi.
Bizga kerak
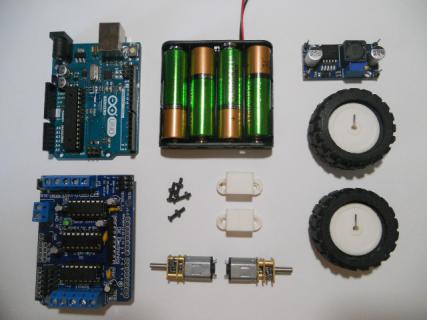
- Arduino UNO - Siz ARDUININ BEO omilining boshqa shakllaridan foydalanishingiz mumkin. Masalan, Leonardo yoki Iskra.
- Avtomobil qalqonchasi - ushbu qalqonning boshqa versiyalari ham mos keladi.
- 6b-dagi motorlar 6b-da - siz motorli qalqonning xususiyatlariga mos keladigan har qanday narsani olishingiz mumkin.
- 42 mm diametrli g'ildiraklar - motorlar va platforma uchun mos
- Motorsni o'rnatish - motorlar platformaga yopishtirish kerak. Sizga mos keling.
- Quvvat - men batareyali birlikni oldim va "Motors va Arduino" ni quvvatlashga etarli emas, shuning uchun men DC / DC konvertatsiyasini quvvatladim va kuchlanishni 9V gacha ko'tardim. Agar konvertor bo'lmasa, ARDUINO kuchlariga ulanib odatdagi tojlardan foydalanishingiz mumkin.
Robotni yig'ish vaqti keldi.
1-qadam
Arduino va avtoulovni bog'lang.

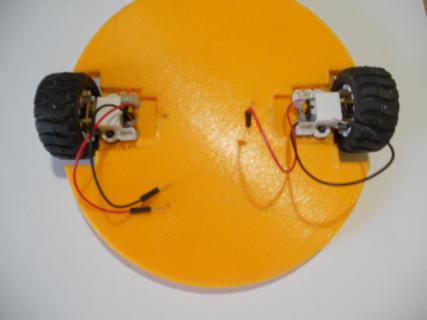
2-qadam.
Biz motorlarni yig'amiz va ularni platformaga aylantiramiz.
3-qadam.
Biz konvertorning ko'payishi orqali ovqat yig'amiz.
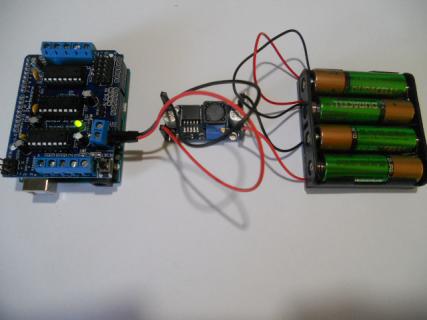
Kronnga boradiganlar uchun. Jumperni unutmang!

4-qadam.
Motorsni Motor Shililga Arduino bilan tugating.
5-qadam.
Oziqlantirish qo'shing.

6-qadam (ixtiyoriy)
Qopqoqni - estetiklar uchun biriktiring.

Bizda tayyor robot bor. Endi uni dasturlash vaqti keldi. Biz kodga qaraymiz.
// Kutubxonani avtoulovi bilan ishlash uchun ulash #include
Zo'r! Tekshirish uchun vaqt. Mana mening chekim bilan video. Sizchi?
"Siz robotik to'lovlar haqida gapirdingizmi?" - Kirish darslarini o'qiganlarni parchaning 2 qismini o'qiydi. Ha, bunday to'lovlar mavjud. Robot platformasi Strelka.
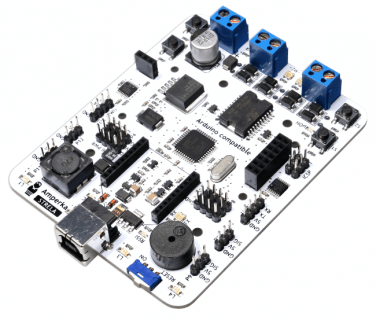
Orzu robototexnika. (Deyarli). Men boshqaruvning afzalliklarini aytib o'tdim. Darhol biznesga.
Unga L293 akasi - L298 o'rnatilgan. Va pinlar ko'plab sensorlarni ulash uchun mos keladigan kuchli uchlikka tushadi.
Ushbu to'lov o'rniga ARDUINO BEO va Motor qalqoni ulanishi mumkin. Bundan tashqari, amperdagi yigitlar kutubxonani o'q bilan ishlash uchun yozgan, bu esa avtoulovni boshqarish juda ko'p ahamiyatga ega.
Bilmaydiganlar uchun ayting. Har bir normal kutubxona o'z-o'zidan foydalanish uchun namunalarga ega va arrow kutubxona mavjud emas. Ularni topish uchun fayl yorlig'iga o'ting -\u003e Misollar -\u003e Strelka. U erda motor qalqoni yordamida eskizning eskizi eshitiladigan skrilamtorlarning misolini tanlang. Aytgancha, avtoulov qalqoni ham misollar keltiradi. Agar qiziqsangiz, ko'ring.
Yana o'q bilan nima qilish mumkin - quyida ko'ring. Bluetooth simsiz aloqaga boramiz.
Bluetooth
O'zi xonaning atrofiga o'tadigan robot, bu, albatta, yaxshi, lekin men robotni o'zim uchun zaryad qilmoqchiman. Buning uchun siz Arduino va boshqaruv moslamasi o'rtasidagi bog'liqlikni tashkil qilishingiz kerak.
Boshqarish moslamasi sifatida men smartfonni tanladim. Aloqa Bluetooth protokolida tashkil qilamiz, shuning uchun tanishish vaqti keldi.

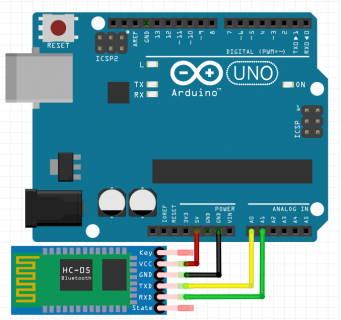
Bu HC-06 modulidir. Men tafsilotlarga kirmayman, lekin kim qiziqadi, boring. Bizning maqsadimiz smartfondan robotni zaryadlashdir. Keling, boshlaylik, ehtimol.
Avval HC-06-ni Arduino-ga ulashingiz kerak. Ulanish dasturiy seriya yordamida amalga oshiriladi. Ushbu kutubxona sizga kerakli presslar uchun ketma-ketlik portini taqlid qilishga imkon beradi. Eksperiment uchun A0 (RX) va A1 (TX) da buni qilishga harakat qiling. Nima uchun? Men motor qalqoni haqida aytganimni eslang.
Xo'sh, ulanish:
- VCC - 5V-ga
- GND - GND-ga
- Rx - TXga
- TX - Rx uchun
Men HC-06-ni yuqorida to'plangan robotga ulayman. Buning uchun avtoulov qalqonida uchta chiziqdan foydalaning.

Robot tayyor. Uni dasturlashda davom etadi.
Kodni o'qishdan oldin siz nimanidir bilishingiz kerak. Motorlar bu dunyoda hamma narsa kabi mukammal emas. Bir partiyadan ikkita dvigatel ham bir-birlari bilan davom etadigan bo'lsa ham, xuddi shu kuchlanishda inqiloblar sonining farqiga ta'sir qiladi. Agar motorlar "Motors" Motor qalqoni bilan bir xil tezlikni qo'llasalar va bu xuddi shu kuchlanishni qo'llasa, robot to'g'ri bo'lmaydi va bir oz yoki ko'p, bir oz yoki ko'p narsa bor. Buni yuqoridagi videoda ko'rish mumkin.
Buning oldini olish uchun biz tuzatish koeffitsientlarini qo'llaymiz. Menda chap g'ildirak bor, bu o'ng tomondan tezroq tupurdim, shuning uchun men kompensatsiya uchun 0,62 koeffitsientni qo'ydim. Koeffitsiyaning qiymati eksperimental ravishda tanlangan.
// kutubxonalarni avtoulovi va dasturiy seriya bilan ishlash uchun ulash uchun #include
Robot tikildi. Endi biz smartfon bilan shug'ullanamiz.
RC boshqaruvchisi
Bluetooth orqali Arduino va smartfonni bog'lash uchun turli xil dasturlar mavjud. Qidiruv kalit so'zlarida: Arduino, Bluetooth, RC.
Men Bluetooth Rc Contrerer deb nomlangan dasturni tanladim. Bu bizning maqsadimiz uchun juda mos keladi. Tugmani bosganingizda, dastur XC-06-dagi Char turini XC-06-ga yuboradi, bu esa ARDUININING KIRIShNING MUHIMINI O'RNATILGAN. Tugma bosilganda yuborilgan qiymat mustaqil ravishda o'rnatiladi.

Robot bilan aloqani o'rnatish uchun siz vitesni bosishingiz kerak va "Sozlamalar" ni tanlang. "Sozlamalar" ni tanlang. "Sozlamalar" ni tanlang Siz ushbu belgilarni yuborgan yoki Arduino kodini o'zgartirganligiga ishonch hosil qilishingiz kerak.

Belgilarni o'rnatgandan so'ng, siz HC-06 ga ulanishingiz mumkin. Biz tishli asboblarni bosamiz va "Connect" ga o'tamiz. U HC-06 tomonidan tanlanadi. Agar bo'lmasa, biz "Qurilmalarni skanerlash" ni qidirmoqdamiz. Agar qurilma topilsa, lekin gugurtni xohlamaydi, keyin odatdagidek smartfoningiz va umr yo'ldoshingizda Bluetooth-ga o'ting. Standart parol - 1234. Shundan so'ng, "Qurilmalar uchun skanerlash" va ulanish.
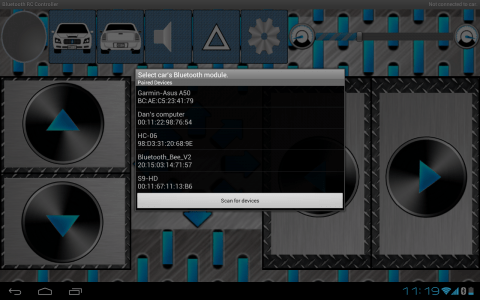
Ulanish o'rnatilganda, yashil chiroq yuqoriga o'girilib, HC-06 yonib-o'chib turadi. Siz boshqarishni boshlashingiz mumkin. Yuqoridan chiziq harakatlanish tezligi uchun javobgardir.
Keling, o'qqa qaytaylik. Bilomning yana bir afzalligi - bu Bluetooth XBe formatini o'rnatish qobiliyati va boshqa pinlar bepul qoladi. O'qlar uchun mo'ljallangan kutubxona mavjud, bu esa avtoulovni boshqarish uchun kodni qisqartirishga yordam beradigan, so'ng Bluetooth robotini boshqarish uchun yuklash robotidan foydalaning.
Buning uchun XBini "Arduinobluootoothccardoothcrafe" deb nomlangan misollardan eskizlar bilan bog'lang va XBee-ga RC-ning boshqaruvchisi orqali ulang.
Maslahat
Mening robotim tayyor va hatto jamoani smartfondan olib boradi. Ammo hamma narsa muammosiz bo'lmaydi. Men ba'zi muammolar va echimlar, shuningdek, bir nechta maslahat boshlang'ich robototsining xonimlari haqida gaplashaman.
G'ildiraklar bu yo'nalishda emas - Bu muammo Cleers yoki dasturiy ta'minotdagi simlarni qayta tartiblash orqali osongina yo'q qilinadi.
Bluetooth moduli ishlamaydi - Siz modulda yonayotgan qizil yoqilgan qizil rang mavjudligini tekshirishingiz kerak. Agar u yonmasa, Bluetooth modulining to'g'riligini tekshiring. Agar LED yoqilgan bo'lsa, lekin ulanish o'rnatilgan bo'lsa, siz TX-modul txlay va aksincha, Standart Bluetooth interfeysi orqali ARDUINO bilan juftlik moduli bilan aloqa qilishiga ishonch hosil qilishingiz kerak.
Robot to'g'ri ketmaydi - Bluetooth va avtoulov qalqon haqida gapirib berganimda, bu muammoni biroz yuqori baholadim.
Haydash paytida robot to'satdan to'xtaydi va ulanish yo'qoladiHC-06. - Muammo energiya manbasida. Biz ARDUININO ARTIFA ISH UChUN 7B dan kam bo'lmagan va biz ham motorlar juda yaxshi iste'mol qilinishini bilamiz. Agar siz motorlar o'chirilgan bo'lsa va motorlar o'chirilgan bo'lsa, kuchlanishni o'lchash va kuchlanishni o'lchashingiz mumkin bo'lsa, siz kuchlanish ko'p hosilning pasayishini ko'rishingiz mumkin. Bundan tashqari, kuchlanishni turli yo'llar bilan tashlang.
Agar elektr komissiyalari uchun elektr ta'minoti ulangan bo'lsa, u holda kuchlanish kuchli bo'lishi mumkin, masalan, ARDUOINA uchun va 5V boshlanadi va u qayta boshlanadi. Eritma - ko'proq kuchli ovqatlanish. Qanday hisoblash kerak, men quyida aytib beraman.
Agar siz elektr tarmog'ini yanada kuchaytirsangiz, stressni torting, shundan keyingina bir nechta millisekundlar uchun bo'lishi mumkin, ammo ular boshqaruvchini qayta boshlash uchun etarli bo'lishi mumkin. Yechim - 1000 km dan oshiq konferentsiyani belgilash uchun quvvat simlariga parallel ravishda konteyner eksperimental ravishda aniqlanishi mumkin. Men 3,3 ming mkf va 16V uchun kondensatsiyani qo'ydim. Maksimal kondensatsion kuchlanishni ko'rib chiqishni unutmang.
Elektr ta'minoti etarlicha kuchli, kuchlanishning pasayishi 0,2v dan oshmaydi.
Boshlang'ich robototexnika uchun bir nechta maslahatlar
Robotni rejalashtirishni boshlash, birinchi narsa elektr ta'minotining kuchini hisoblash va tegishli elektr ta'minotini tanlash maqsadga muvofiqdir. Agar 4 ta AAA batareyalari sizning 4 6 volt motoringizni tortmasa, uyat bo'ladi va ko'proq kuch manbai uchun joy bo'lmaydi.
Motors, taxtalar, sensorlarning xususiyatlarini qidiradigan kuchni hisoblash. Fizika kursidan biz shuni bilamizki, kuchni formulasi p \u003d iu formulasi bilan hisoblash mumkin, u erda hozirgi kuch, u - kuchlanish. Ushbu formulalar va xususiyatlardan foydalanib, tayyor qurilmaning quvvat sarfini hisoblash va quvvat sarfini va ish kuchlanishini bilish oson, siz hozirgi kuchni bilishingiz mumkin bo'lgan qurilma uchun zarur bo'lgan optimal kuchni topishingiz mumkin. kerakli batareya quvvati va qurilmaning ish vaqti tanlangan batareyadan..
Aytganimdek, loyiha erishilganda har doim aniq maqsad qo'yishingiz kerak, uni bajarilishi mumkin. Bu fikrlarda nuans bor. Agar loyiha etarlicha katta bo'lsa, unda maqsadga erishish juda oson emas, ayniqsa kodni yozganda. Men bir marta katta kodni yozdim, deb o'yladim - "Men hozir hamma narsani yozaman va tekshiraman! "Kodni tuzishga urinayotganda, u darhol tuzilmadi, chunki bir nechta xatolar bo'lgan. Men olib tashlagan xatolar, lekin men xohlagancha kod ishlamadi. Men hamma narsani deyarli noldan qayta yozishim kerak edi, asta-sekin kodni qo'shing va natijada natijada olingan kodni tekshiring. Shunday qilib, men sizlarga va sizlarga maslahat beraman.
Agar uchta belgidan iborat "parol" ni amalga oshirish uchun maqsad bo'lsa, unda siz darhol uchalasini dastur qilmaslik kerak. Bir belbog'dan parol qo'yish yaxshiroqdir, uni tekshirib ko'ring, so'ngra ikkidan va tekshirilgandan so'ng - uchdan tashqarida. Bu menga yordam beradi.
Robot sinov usuli va xato usuli bilan yaratiladi. Harakat mukammal ekanligi uchun bir marta dasturlash mumkin emas. G'ildiraklardagi bir xil koeffitsientlar, shuning uchun biror narsa ishlamasa, qo'llaringizni tushirish kerak emas va agar u umuman ishlamasa, siz forumlarga yaxshi odamlarga murojaat qilishingiz yoki menga yozishingiz mumkin, albatta yordam beramiz!
Xulosa
Robototexnika - ajoyib narsa! Tez orada robotlar oladi, aks holda ular allaqachon odamlar hayotida o'z o'rnini egallashgan. Biz eng oddiy robotni smartfon nazorati bilan tuzdik, keyinchalik jiddiy loyihalarni amalga oshiramiz, ammo hozirgacha - tez orada!
Xayrli kun! Sizdan oldin, aziz, badiiy robot 4 dan 9 sm gacha turli xil sharsimon yoki tuxum shaklidagi buyumlarni bo'yashi mumkin.
Uning ishlab chiqarish uchun 3D printer, standart + Arduino vositalarining to'plami.

Eslatma: 3D printer ishlatilgan loyihalarga xoch qilmaslik kerak. Agar xohlasangiz, siz har doim loyiha uchun zarur bo'lgan qismlarning muhriga buyurtma berishingiz mumkin bo'lgan joy yoki usulni topishingiz mumkin.
1-qadam: robot haqida ozgina

Badiiy robot - ikki o'q o'z-o'zini tayoqchibu juda sharsimon yuzalarda chizilgan rasmni qo'llashi mumkin. Robot ma'lum bir narsaning ma'lum bir turi ostida (Ping tongi, Rojdestvo bezaklari, lampochkalar va tuxum (o'rdak, g'oz, tovuq ...) konfiguratsiya qilingan.

Sferik ob'ektni aylantirish va manipulyatorni siljitish va yuqori tukli o'lik dvigatellarini yuqori tutqich ishlatiladi, va dastagini ko'tarish uchun - tinch va ishonchli SG90 servlo.
2-qadam: Kerakli tafsilotlar

Qilish uchun buni o'zingiz bajaring Bizga kerak:
- 2x 623;
- Diametri 3 mm va uzunligi 80-90 mm bilan;
- 1x bahor (uzunligi 10 mm va diametri);
- 2x Stepper Motor Nema 17 (4.4 kg / sm masofa);
- Dvigatel kabellari (14 + 70 sm uzun);
- USB kabeli;
- 1x Sero SG90;
- Arduino Leonardo;
- qalqon JJRobotots;

- 2xa4988 Stendper Motors uchun haydovchilar;
- 12V / 2A elektr ta'minoti bo'limi;
- 11x vintlar m3 6 mm;
- 4x vintlar
- 4x m3 yong'oq;
- 2x 20 mm so'rg'ich;
- 1x yong'oq lam m3;
- 1x marker;

3-qadam: Umumiy sxema

"Croib" sifatida siz ushbu sxemani ishlatishingiz mumkin.
4-qadam: Boshlaymiz!

Robot manipulyatorni, sterlik motor orqali faollashtirilgan marker bilan harakat qiladi. Yana bir piyoda dvigatel ob'ektni chizish uchun (tuxum, bal ...) burish uchun javobgardir. Elementni saytda ushlab turish uchun ikkita so'rg'ichdan foydalaniladi: pechkik motorga, ikkinchisi mavzuning qarama-qarshi tomonida. Kichik bahor so'ruvchisiga mavzuni ushlab turishga yordam beradigan bosim o'tkazadi. Markerni ko'tarish / tushirish uchun SG90 Sero ishlatiladi.
5-qadam: Manipulyator




Yong'oqni unga tayyorlangan teshikka o'rnating va 16 mm vintni aylantiring. Keling, narsalarning egasi (yuqoridagi rasmdagi o'ngda). Mangipulyator uchun menteşae yaratishda 2 16 mm vintlardek ishlatilgan. Vintlarni vintlarni vintlarni vintlardek aylantirish kerak.



6-qadam: so'rg'ichlar

Biz ma'lum bir assimilyatsiya stakanlaridan birini buyumlar ushlagichi-da o'rnatamiz.
7-qadam: Stuper Motorsni mahkamlash

8 vintdan foydalanib, o'lik motorlarni asosiy ramkaga ko'ming.


8-qadam: aylanish o'qi

Keling, yuqoridagi rasmda ko'rsatilgandek barcha narsalarni joylashtiraylik.
- So'rg'ich;
- Yong'oq;
- Yuqori qism;
- Bahor;
- 623 rulmi (chap stakanga qurilishi kerak);
- Chap chashka;
- Asosiy ramka uchun bo'sh joy;
- To'g'ri kubok;
- 623 ta otish;
- Ajratish halqasi;
- Yong'oqka (m3).

9-qadam: Biz hamma narsani joyida joylashtiramiz

O'yinli manipulyatorni o'jar omisiga joylashtiring.

Biz chap qo'lni o'jar omisiga o'rnatamiz.

Marker va tuxum misol sifatida o'rnatiladi (endi ular joylashtirilishi shart emas).

Eslatma: Servo sozlashni talab qiladi. Kalibrlash jarayoni paytida uning burchakni qayta o'rnatishingiz kerak.


10-qadam: Electronics
Elektronikani vintlar bilan asosiy ramkaning orqa tomonida yoqing (2-chi etarli bo'ladi).

Kabelni ulang.

Agar siz Steper Motorsni ulaganda poezdlikni chalg'itsangiz, ular shunchaki qarama-qarshi yo'nalishda aylanadi, ammo servlo bilan bog'liq vaziyat shu qadar zararsiz bo'lmaydi! Shuning uchun ulanishdan oldin qutblikni ikki marta tekshiring!

11-qadam: Arduino Leonardo dasturlash
Biz Arduino Leonardoning Arduino IDE dasturidan foydalanib, (V 1,8.1) dasturini amalga oshiramiz.
- Arduino IDR (V 1.8.1) va dasturni o'rnating;
- Dasturni ishga tushiring. Arduino Leonardo to'lovini tanlang va asboblar -\u003e Bort menyusidagi mos keladigan com port;
- Sferan-O-BOT kodini oching va haydang. Xuddi shu papkadagi barcha fayllarni oching va uni "EjdDino_arduino" deb nomlang.
12-qadam: San'at roboti san'at asarlarini yaratishga tayyor

13-qadam: robotni boshqarish

Dasturiy ta'minot Inkcape.Yuklash va inkcscae dasturini o'rnatish (men 0,91-ning barqaror versiyasini tavsiya qilaman).
Tadbotni boshqarishning kengaytmani yuklang va o'rnating (2.4.0 versiyasi to'liq sinovdan o'tgan).

Tadboqni boshqarish ExScape uchun kengaytirilgan vositadir, sinov va kalibrlangan tuxumch, shuningdek, tuxumga o'tkazilgan rasmlar mavjud. Avval siz Inkcape ishga tushirishingiz kerak. INKSCAPEni ishga tushirgandan so'ng, "kengaytmalar" menyusi paydo bo'ladi va "Tadbot" ning "Tadbot" subenuisini tanlash kerak. Agar siz egrotning cho'puti ko'rmasangiz, unda siz kengaytmalarni noto'g'ri o'rnatgansiz. Qayta tiklash va kengaytmalarni o'rnatish bo'yicha ko'rsatmalarga amal qiling.
Bularning barchasi, diqqatingiz uchun rahmat!)
Biz kayfiyatdagi kayfiyatning yakuniy qismi - biz shassilarda yig'amiz - ovqat uchun plastik idishdagi qopqoq. Bizning robotimiz miyamiz - bu Arduino BMT kartasi, dvigatellar va servos dvigatellar, to'siq sensori - Vodiyga (multfilmdan) - "HC-SR04 Ultraton sensori". . Arduino robotini qanday yaratish kerak?
9. Batareya va motor ulanishi
Batareyani ulaganda, siz poligonliklarning bajarilishining to'g'riligini mutlaqo ishonchingiz komil, chunki ular har bir marta ulangan. Bunday qoidaga rioya qilishga harakat qiling - qizil sim har doim k + oziq-ovqat, qora sim - er, minus, bu yalpiz. Ishlab chiqaruvchilar bir xil qoidalarga rioya qilishga harakat qilishadi. Shuning uchun, batareya bo'linmasidan kelayotgan simlar blokni boshqarish taxtasida blok + m va GND-ga ulaning. Haydash dvigatellaridan simlar m1, m2 boshqaruv taxtalari. Chap tomoni, harakat davomida, m1 blokirovkaiga ulangan m2 blokirovkaga ulangan. Dvigatellarning qutblari haqida tashvishlanmaslik kerak, agar sinov paytida biror narsa noto'g'ri bo'lsa, uni o'zgartirish mumkin.
10. Biz qutblikni tekshiramiz va modullarni to'g'ri ulaymiz
Mikrobot yig'inining muhim va mas'uliyatli lahzasi, blokli blokirovkaga muvofiq o'rnatish, ulanishlar, modullarning to'g'riligini tekshirish, biz taxtalardagi yorliqni ko'rib chiqamiz, sinovdan o'tkazilgan yorliqni, sinovdan o'tkazishni, elektr ta'minotining yordami bilan tekshiramiz Tester kim bor.
11. Arduino dasturlash bosqichi
Arduino mikrokontonteridagi dastur kompyuterdan USB kabeli va maxsus dasturlash va tahrirlash muhiti va maxsus dasturlash va tahrirlash muhiti (dasturlar) - ARDUOIN ODE-dan foydalanib quyiladi. Siz dasturni Arduino.CC saytidan olishingiz mumkin, yuklab olish bo'limi, dasturning so'nggi va so'nggi versiyasini doimo yuklab olishingiz mumkin. Dastur muhitidan keyin faqat siz foydalanmoqchi bo'lgan haydovchining dasturi menyusidan, - bizning holatda, Arduino Beo va Arduino USB emulyatsiyasi orqali u orqali joylashgan. Ushbu xarajatlarda har xil qo'llanmalar, shuning uchun biz ushbu bosqichni o'tkazib yuboramiz (faqat - Tools\u003e Serial port menyusida).

Siz bizning saytimizdan kelganidan keyin bizning saytimizdan Micro robot dasturini faqat Arduindagi mini robot uchun dasturlashingiz mumkin. Dastur ishlashi uchun qo'shimcha kutubxonalar kerak - AFMotor.h, Yangi.h, NewPing.H, ularning barchasi arxivda, ularning barchasi Arduino Idning IDUINI o'rnatilgan holda arxivni olib tashlashingiz kerak. Mening katalogingiz bor: dastur fayllari (X86) Arduino, kutubxonalar papkaga qo'yish kerak c: Dastur fayllari (X86) Arduinoliborariyalar. Keyin C: dastur fayllari (x86) katalogiga kiring ARDUINOLBRAPCAPC_4_RABOT, APC_4_ROBOT.INO SOAM-ni bosing, bu eskizning o'zi, keyin dasturlash muhiti boshlanadi. Arduino Bleo Yalang'och taxtani ulang USB sim orqali kompyuterning ulanishini o'ng tomonga bosing, dastur boshqaruverga quyila boshlaydi. Butun jarayon bir necha soniya davom etadi va agar hamma narsa to'g'ri ulangan bo'lsa, qizil yozuvlar yoqilmasligi kerak va pastki o'ng burchakdagi ko'rsatkich o'z harakatini 100% ga oshiradi. Arduino dasturi ATMEGA328 nazoratchisi o'rnatildi.
12. robotni yugurish

Arduino-dagi mini robot - ko'chib o'tishga tayyor. Robot vitsi.
Siz bizning robotimizning yana bir sinovini boshdan kechirishingiz mumkin. Bizning robotimiz noto'g'ri ketdi, bitta g'ildirak, o'ng tomonga va ikkinchisining qarama-qarshi yo'nalishda. M2 blokidagi dvigatel simlarining qutbining qutbini o'zgartirishim kerak edi. Ammo keyin bizning kichik robotimiz sharafli, barcha burchaklar va xonadagi to'siqlar bilan engillashtirdi.
Men ushbu maqolani Arduinani o'rganishga qaror qilgan barcha boshlang'ichlarga bag'ishlayman. Keyingi darsdan keyingi o'qish davom ettirilishi mumkin - LED tomonidan yonib-o'chib turadi. Robot bilan material, bu juda qiziq va sizni qiziqtirgan holda, men muomaladagi to'siqlarning robotini qanday qurishni boshlashga qaror qildim. Keyinchalik yanada osonroq bo'ladi va yog 'kabi. Bu robot haqiqatan ham ishlaydi. Hammaga omad!
P.S. Bu maqolaning juda erkin tarjimasi, ancha oldin Internetning cheksiz chegaralarida, albatta, ko'pchilik bosilgan, chunki hamma narsa yangi, rasmlar yaxshilangan, manbaga oid ma'lumot yo'q, Hujjat Vordvskiy bo'lganligi sababli.
Arduinni o'rganish oddiy robotlarni yaratishdan boshlanadi. Bugun men sizga ARDUININ BTO-dagi eng oddiy robot haqida aytib beraman, u itingiz sizning qo'lingiz yoki infraqizil nurni aks ettiruvchi boshqa biron bir ob'ekt uchun. Shuningdek, ushbu robot bolalarni ta'qib qiladi. Mening 3 yoshli jiyam robot bilan o'ynagan :)
Men qurilishda zarur bo'lgan qismlar ro'yxatidan boshlayman - Arduino Beo;
Infraqizil paspitserlar;  - vites qutislari va g'ildiraklari bo'lgan 3 volt;
- vites qutislari va g'ildiraklari bo'lgan 3 volt;  Batareyalar batareyalari uchun ulagichlar;
Batareyalar batareyalari uchun ulagichlar;  -Nicatumulyator (agar batareyalar etarli bo'lmasa);
-Nicatumulyator (agar batareyalar etarli bo'lmasa);  - dvigatellarni boshqarish uchun;
- dvigatellarni boshqarish uchun; 
Yaratilish jarayonida zarur bo'lgan boshqa materiallar.
Avval biz asosdamiz. Men uni daraxtdan yasashga qaror qildim. Yog'och taxta va shu tarzda chayqalishlar juda yaxshi o'tirishadi 

Keyin men bu barni bo'yash bilan daraxtdan taxta bilan ko'tarilaman 
Uy-joy oldida men Arduino, o'rni, Bridad, massivlar va shassi ostida 
Endi hamma sxema bo'yicha ulanadi 
Oxirida, siz Arduino-da keyingi eskizni yuklaysiz:
Konts int \u003d 13; // iR dortiScinders Coc L \u003d 12 ulangan pinlar ulangan; Int Motorl \u003d 9; // rul Motorr \u003d 11 ga ulangan pinlar ulangan; ST tugmachasini bosing \u003d 0; VOLD sozlash () (R, Kirish); Pinmode (l, kirish);) xolose (motorstate \u003d l); if (tugmachali); if \u003d\u003d yuqori) (DigRorwrite (digitalwrite (MOTROR, FOYDALANGAN (R); agar (tugmachali \u003d\u003d yuqori) (digitalwite \u003d\u003d yuqori);););) (Digitalwrite (mototml, past);)))))
Harakat printsipi juda oddiy. Chap oralig'i to'g'ri g'ildirak uchun javobgar va chap tomon uchun o'ng 
Buni aniqroq qilish uchun siz robotning yaratilishi va harakati ko'rsatilgan videoni tomosha qilishingiz mumkin.
Ushbu robot juda oddiy va hamma buni amalga oshirishi mumkin. Bu sizga bunday modullarning harakati printsiplarini, estay va IR oralimalari va ularni qanday ishlatishni yaxshiroq anglashga yordam beradi.
Umid qilamanki, sizda bunday uy qurilishi yoqdi, chunki uy qurilishi ajoyib!